


 Romain Lagneau will defend is PhD on December the 4th 2020 at10:00AM.
Romain Lagneau will defend is PhD on December the 4th 2020 at10:00AM.
Nowadays, robots are able to manipulate rigid objects at a high rate and with an accuracy greater than human operators. However, when it comes to non-rigid objects, dexterous robotic manipulations become much difficult due to the deformations that occur when forces are applied. Improving the manipulation of such objects is crucial for applications such as food manufacturing or surgery. Among the scientific challenges arising from the robotic manipulation of deformable objects, we chose to focus our work on controlling their shape and estimating their physical properties.
First, we propose a novel deformation servoing method allowing to control the shape of an object while not requiring any knowledge on its physical properties. We estimate online the deformation Jacobian matrix that relates the motions of the end-effector(s) to the resulting deformations. Using this matrix, it is possible to compute the velocity control law that permits to generate a desired deformation. To evaluate the accuracy and stability of the method, we also propose both a marker-based and a marker-less evaluations.
Then, we present a method permitting dual-arm robotic manipulation of deformable wires. To this end, we propose a novel visual feature based on a geometric model to infer the shape of a deformable wire. Along with this novel visual feature, we propose a wire tracking method that permits to infer the 3D shape of a deformable wire at an interactive time. Finally, a model-free deformation servoing is used to control two end-effectors handling the extremities of the wire.
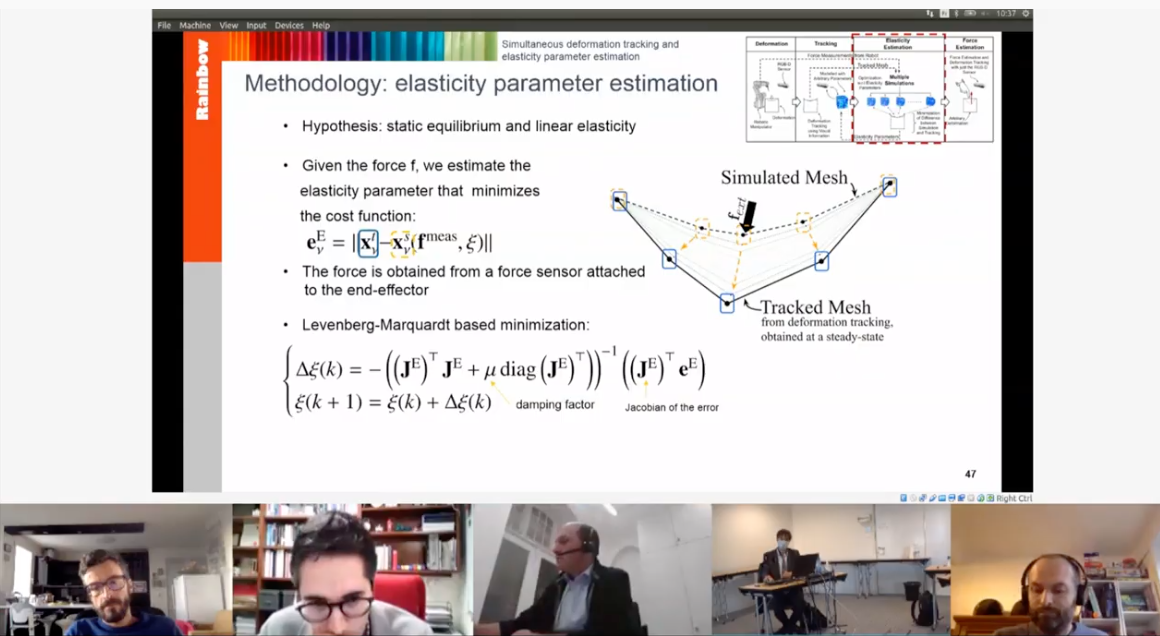
Finally, we propose a method to simultaneously track a non-rigid object and estimate its stiffness. Using the deformation tracking results and force measurements, the stiffness parameter is estimated in a optimization procedure. The physical parameters used for deformation tracking are updated using the estimated value, closing the loop. When convergence is reached, the deformation tracking can be used as a remote force sensor.
By improving robotic manipulation of deformable objects, these contributions pave the way for the development of robots able to automatically adapt their behavior with unknown deformable environments, allowing them to replace human operators in harmful environments.
Jury Composition :
- Tamim Asfour, Professor, Karlsruhe Institute of Technology, Examinateur
- François Chaumette, Directeur de recherches, Inria Rennes, Examinateur
- Andrea Cherubini, Maître de Conférences, Univ. Montpellier, Rapporteur
- Christian Duriez, Directeur de recherches, Inria Lille, Rapporteur
- David Navarro-Alarcon, Assistant Professor, The Hong Kong Polytechnic University, Examinateur
- Maud Marchal, Professeure, INSA Rennes, Directrice de thèse
- Alexandre Krupa, Chargé de recherches, Inria Rennes, Co-directeur de thèse