


Open PhD Position in
Full-Body Design and Control of an Aerial Manipulator for Advance Physical Interaction
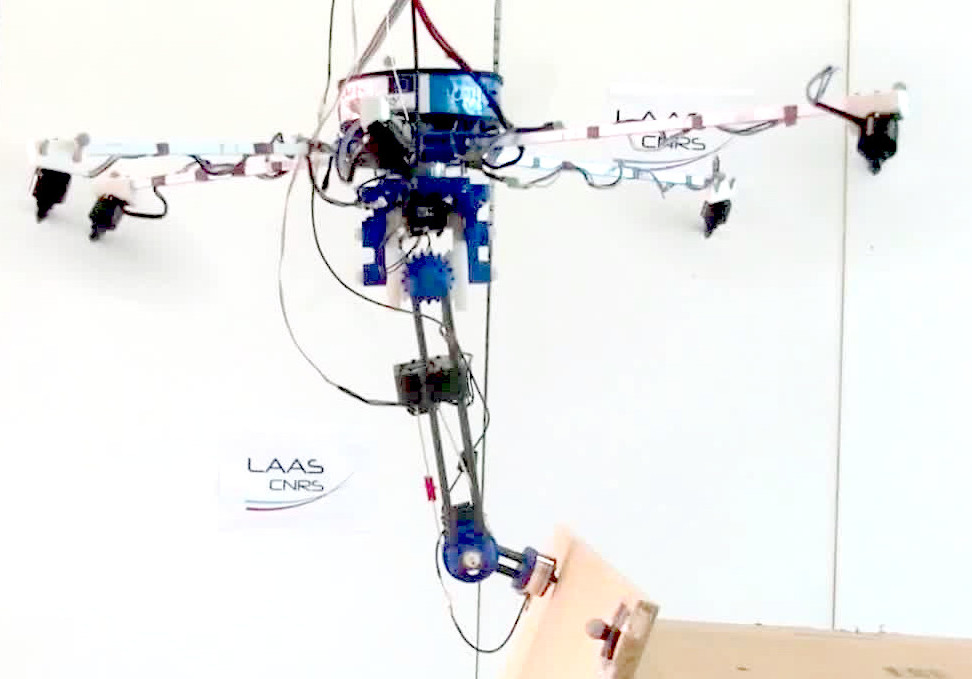

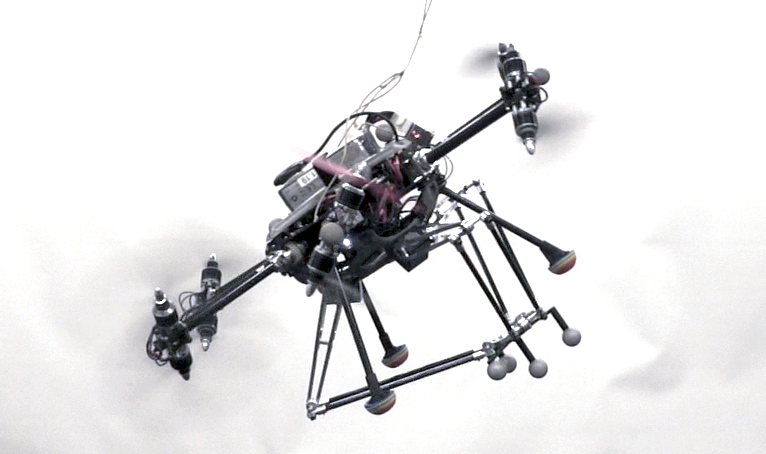
Image credits to [3], [6] and [7]
Hired by the Rainbow team at IRISA/Inria Rennes, France
Advised by: Paolo Robuffo Giordano and Marco Tognon (Rainbow team)
How to apply: Interested candidates are requested to apply via this form. The position will remain open until a satisfactory candidate is found.
Context
Aerial robots (commonly called “drones”) are nowadays extensively used to see the environment in applications like agriculture, mapping, etc. But, if aerial robots were also able to effectively manipulate the environment, the application domains could be further extended toward new areas like contact-based inspection, assembly and construction, and so on. The research community has previously focused on the design and control of aerial manipulators [1]. This opened the door to new applications, e.g., contact-based inspection [2]. However, current methodologies are still limited to very simple interaction tasks, involving limited contact behaviors with static and rigid surfaces (e.g., touching a flat wall with a stick attached to the robot) and in very controlled environments.
So far, aerial manipulators have been treated as a combination of two subsystems: the aerial vehicle and the robotic arm mounted onboard. Both design and control methods for aerial manipulators also follow this separation principle. However, this approach leads to poor results in terms of task execution and robustness. Aggressive maneuvers, complex manipulation tasks, and effective rejection of disturbances are not possible due to the missing coordination between the two parts of the aerial manipulator.
In this PhD we want to go beyond the current approaches looking at aerial manipulators as a whole system, both from the design and control perspectives. This should allow obtaining more precise and robust aerial manipulators that could be used in more complex task, e.g., in construction sites helping humans for burden operations.
Envisaged Activities
The work will start from the previous platform and full-body control method presented in [3]. From there, the PhD is expected to give contributions to the following points:
-
- Mechatronic Design: we believe that considering actuation inaccuracies already at the design level can allows to conceive an aerial manipulator that is intrinsically more robust. We will rely on the concept of “state/input sensitivity” [4,5] to design a platform where the actuation configuration minimizes the effect of their inaccuracy on the overall force/torque generation. Such a design problem can be casted in an optimization framework where additional criteria as the energy efficiency and the manipulability can be considered. We will also investigate the use of proper force/torque-controlled actuators for both thrusters and joints to have high precision and robustness during physical interaction tasks.
- Control: if previous methods controlled the aerial platform and the arm as separate systems, here we aim at a proper full-body controller where a task is accomplished exploiting at best all the robot’s degrees of freedom, considering the limitations and properties of the robot dynamics, as well as its actuation limits. Previous attempts were always limited by the poor design which did not allow to properly control each actuator at the force/torque level [3]. Thanks to the new design envisaged in this PhD, this will be finally possible and we will be able to properly design full-body controllers. Initially, we will use model-based methods. However, due to the complexity of the system, errors due to modelling errors are expected. We plan to tackle this problem in two ways, which will then be compared. The first one is to enhance first principles modelling with data-based modelling. The second one is to use model-free approaches based on reinforcement learning. One output of this project will then be the investigation and comparison of the performance and limitations of both approaches.
- Experimental validation: the new platform and control methods will be validated and tested firstly on benchmark tasks, like following a trajectory in free flight, apply a certain force to a rigid wall, and sliding an end-effector along a surface. This will allow to properly assess the advancement with respect to the state of the art. However, we will also demonstrate the new system capabilities on complex tasks that are extremely challenging for current aerial manipulators, e.g., opening a door or physically interacting with humans. The tests experimental tests will be carried out in the robotic room and drone arena of the Rainbow team.
Skills/Requirements
- M.Sc. or Ph.D. degree in mechatronics, robotics, engineering, computer science (or related fields)
- Good experience in C/C++ , ROS, Matlab/Simulink, CAD
- Good experience with numerical trajectory optimization tools for robotics (e.g., use of CaSaDi, Acado, Autodiff, Crocoddyl, etc.)
- Scientific curiosity, large autonomy and ability to work independently
Conditions
The Ph.D. position is full-time for 3 years (standard duration in France). The position will be paid according to the French salary regulations for PhD students.
How to apply
Interested candidates are requested to apply via this form.
The position will remain open until a satisfactory candidate is found
References
- A. Ollero, M. Tognon, A. Suarez, D. J. Lee, and A. Franchi. “Past, present, and future of aerial robotic manipulators.’’ IEEE Trans. on Robotics, 2021.
- M. Tognon, Tello-Chavez, H. A., Gasparin, E., Sablé, Q., Bicego, D., Mallet, A., Lany, M., Santi, G., Revaz, B., Cortés, J., and Franchi, A., “A Truly-Redundant Aerial Manipulator System With Application to Push-and-Slide Inspection in Industrial Plants”, IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1846-1851, 2019.
- G. Nava, Sablé, Q., Tognon, M., Pucci, D., and Franchi, A., “Direct Force Feedback Control and Online Multi-Task Optimization for Aerial Manipulators”, IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 331-338, 2020.
- P. Robuffo Giordano, Q. Delamare, A. Franchi. Trajectory Generation for Minimum Closed-Loop State Sensitivity. In IEEE Int. Conf. on Robotics and Automation, ICRA’18, Pages 286-293, Brisbane, Australia, May 2018
- P. Brault, Q. Delamare, P. Robuffo Giordano. Robust Trajectory Planning with Parametric Uncertainties. In IEEE Int. Conf. on Robotics and Automation, ICRA’21, Pages 11095-11101, Xi’an, China, May 2021
- M. Brunner, G. Rizzi, M. Studiger, R. Siegwart, and M. Tognon, “A Planning-and-Control Framework for Aerial Manipulation of Articulated Objects”, IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10689-1069, 2022.
- K. Bodie, M. Tognon, R. Siegwart, “Dynamic End Effector Tracking with an Omnidirectional Parallel Aerial Manipulator”, IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 8165-8172, 2021.