A new paper has been accepted in IEEE Robotics and Automation Letters thanks to Thibault Noel. It will be presented at ICRA’24
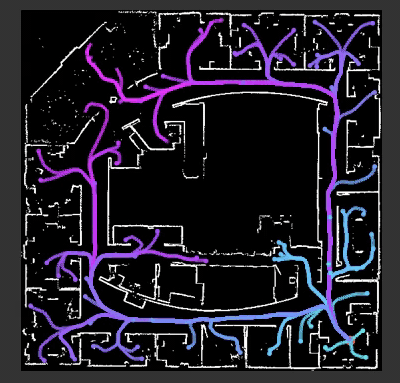
This paper is related to planning and exploration
- T. Noël, A. Lehuger, E. Marchand, F. Chaumette. Skeleton Disk-Graph Roadmap: a Sparse Deterministic Roadmap for Safe 2D Navigation and Exploration. IEEE Robotics and Automation Letters, To appear, 2023.






This paper is a collaboration with Créative