


Hired by: the Rainbow team at IRISA/Inria Rennes, France
Advised by: Paolo Robuffo Giordano, Claudio Pacchierotti, Antonio Marino (Rainbow team)
Context
In the context of scarce knowledge and computation constraints, neural networks have become a viable way to model system dynamics and control actions thanks to their approximation capabilities. Within the domain of multi-robot systems, graph neural networks (GNNs) and their variants emerged as data-driven models for systems employing communication strategies [Li et Al., 2020]. Given that a group of communicating agents forms a graph, GNNs offer effective models for distributed estimation and control, even in the absence of detailed knowledge regarding individual robot dynamics. However, a notable drawback of these models lies in the substantial volume of communication variables required to achieve accurate predictions, surpassing those of their model-based counterparts [Blumenkamp et al., 2022]. Existing literature primarily addresses this challenge through the optimization of graph topology [Yang et al., 2021], focusing on minimizing the number of communication links within the graph.
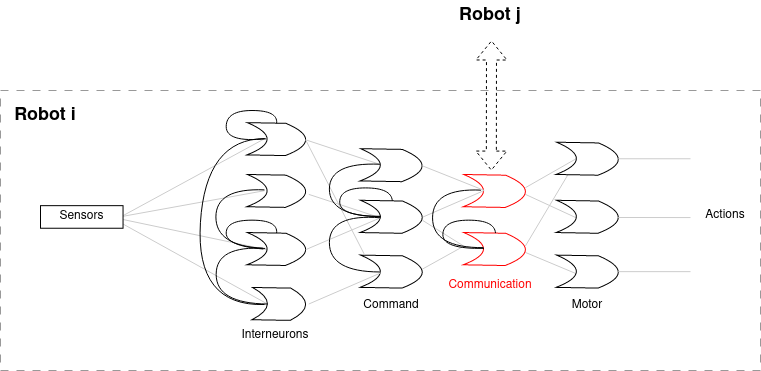
Historically, neural networks took inspiration from biological systems and neuron models regulating the flow of currents in the neuronal cell membrane. Recently, Lechner et Al., 2020 proposed a novel architecture that combines the expressivity ability of the Liquid-Time-Constant network, a continuous neural model, with a sparse pattern in the neural network architecture. In particular, inspired by the nervous systems of C. elegans nematodes, the architecture divides the neurons composing the network in sensory, command and motor neurons, sparsely connected to each others. Although serving different purposes in driving the sensor input to the predicted outputs, each neuron employ the same dynamics. This architecture has proven highly effective in controlling autonomous agents for diverse tasks and demonstrates remarkable generalization capabilities beyond the training distribution [Chahine et al., 2023].
Motivated by the success of this innovative topology, the primary objective of this internship is to develop a novel neural network architecture wherein only a limited number of neurons are necessitated to communicate encoded information effectively. An example of such topology is illustrated in Figure 1. A possible architecture can take inspiration from the communication mechanisms of living beings, including birds or fishes, which deploy dedicated mechanisms for communication and cooperation with other animals/agents [Herzing et Al., 2015, Bass et Al., 2003,Avena-Koenigsberger et Al., 2018]. The ultimate goal of this work is to develop a general machinery to learn autonomous policy to generate control actions and estimations tailored for the complex dynamics inherent in multi-robot systems. In this respect, the candidate will implement benchmarks to train and evaluate the proposed learning model. Subsequently, rigorous testing will be conducted on a team of UAVs within a designated flight arena, deploying one of the use cases. Through these iterative steps, we aim to not only validate the efficacy of the developed model but also to demonstrate its robustness in real-world scenarios, thereby advancing the frontier of autonomous robotics.
References
◦ Lechner, Mathias, et al. “Neural circuit policies enabling auditable autonomy.” Nature Machine Intelligence 2.10 (2020): 642-652.
◦ F. Yang and N. Matni, “Communication Topology Co-Design in Graph Recurrent Neural Network based Distributed Control,” 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 2021, pp. 3619-3626, doi: 10.1109/CDC45484.2021.9683779.
◦ Avena-Koenigsberger, Andrea, Bratislav Misic, and Olaf Sporns. “Communication dynamics in complex brain networks.” Nature reviews neuroscience 19.1 (2018): 17-33.
◦ Bass, Andrew H., and Jessica R. McKibben. “Neural mechanisms and behaviors for acoustic communication in teleost fish.” Progress in neurobiology 69.1 (2003): 1-26.
◦ Herzing, Denise L. “Making sense of it all: multimodal dolphin communication.” (2015).
◦ Blumenkamp, Jan, et al. “A framework for real-world multi-robot systems running decentralized GNN-based policies.” 2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022.
◦ Li, Qingbiao, et al. “Graph neural networks for decentralized multi-robot path planning.” 2020 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2020.
◦ Chahine, Makram, et al. “Robust flight navigation out of distribution with liquid neural networks.” Science Robotics 8.77 (2023): eadc8892.
Envisaged Activities
-
Orientation and understanding of the problem: analysis and review of the relevant literature to understand existing biological and artificial neural models from which to take inspiration. (M1-M2).
-
Multi-robot experiments design: Design benchmark examples employing different tasks for multi-robot systems at different scales to evaluate the proposed architecture and collect data for training dataset (M3).
- Training and variants evaluation: Implementation and validation of possible improvements that could enhance the proposed proposed model compared to previous GNN designs using the datasets collected. (M4).
- Implement the solution on the real system. Deploy the proposed model on a team of uavs in the flight arena. (M5).
- Final refinements, data collection and documentation: organize the collected results for analysis. Document the implemented methodology, the provided solution and the deployment in the new robotic application in a final technical report. Writing of a scientific paper (M6).
Environment
The work will be carried out at IRISA-CNRS in Rennes as part of the Rainbow team (https://team.inria.fr/rainbow/), which is internationally recognized for its scientific activity as well as for technology transfer experience in the field of shared control, multi-robots, haptics, sensor-based control, visual tracking, and visual servoing.
CNRS is is the largest fundamental science agency in Europe, ranked the second most important global research institution in terms of scientific publications (source: Scimago Institutions Rankings) and the eight most important in terms of innovation (source: Thomson Reuters).
Rennes in a lively city in the north-west part of France, capital of the Britanny region. Located 90 minutes from Paris and less than one hour from the sea, Rennes was named as the leading French city in Europe for “quality of life” in 2020 and has the highest satisfaction rate among its inhabitants (source: European Commission).
Requirements
• Experience in C/C++, Python, robotic control, drone control is a plus;
• Excellent scientific curiosity, motivation, and ability to work independently.
How to apply
Contact Antonio Marino at antonio.marino@irisa.fr, providing Curriculum Vitae
(CV) and transcript of record. All the candidates will go through an interview process.