
Context: Over the past years, variational autoencoders (VAEs) have proven efficient for generative modeling of complicated signals, e.g. speech and audio [1]. Recently, they have successfully been applied to audio-visual speech separation (AVSS) [2], where the goal is to separate a target speech from a mixture of several speech signals, utilizing the visual information of …
Category: Job Offers
Oct 26
[Closed] Master Internship on Disentanglement of Latent Codes in Dynamical Variational Autoencoders
Context: Deep latent variable models (DLVMs) provide an effective way to model the underlying hidden generative process of natural signals and images [1]. This allows us to approximate the probability density functions of data which in turn can be used for either generating new examples resembling training data or do probabilistic inference and estimation. Variational …
Oct 07
[Closed] Master Internship on Meta and Transfer Learning for Deep Reinforcement Learning in Robotics
Topic: The internship is part of our research project into Deep Reinforcement Learning (DRL) [1] for the European SPRING project. SPRING aims to develop control mechanisms for mobile robots that will be employed in hospitals and health care environments. The robots should communicate with elderly people, their families and caretakers to inform, aid and entertain …
Nov 07
[Closed] Master Internship on Audio-visual speech separation using variational auto-encoders
Topic: In this Master thesis, we address the problem of speech separation given single-channel microphone mixed speech and video frames of the involved speakers. Although there exist several audio-only speech separation methods [1], here, we aim to utilize also the visual information, that is, video frames of speakers’ lips. This would help to distinguish different …
Nov 07
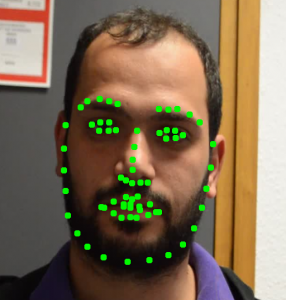
[Closed] Master Internship on face alignment for audio-visual speech enhancement

In many audio-visual applications, e.g., speech enhancement and speech recognition, it is desirable to have aligned images of the mouth region such that a deep neural network can extract reliable visual features. Indeed, the quality of the extracted visual features impacts the performance of audio-visual based applications. In reality, however, a speaker’s face is constantly …
Nov 06
[Closed] Master Internship on Deep Speaker Recognition
Topic: Identification models have witnessed major improvements with the recent development of deep learning, especially when applied to the visual domain, contributing to the development of face-recognition [1] and person re-identification [2]. However, comparable performances are yet to be achieved when applied to audio-based speaker recognition. Recent dataset assembling efforts [3] leverage the use of …
Nov 05
Master Internship on Deep Bayesian Filtering
In signal processing and in computer vision, some of the most powerful tracking methods are based on the Kalman filter. The latter belongs to the unsupervised class of machine learning techniques and may well be viewed either as the simplest dynamic Bayesian network (DBN) or as a state-space model: it recursively predicts over time a …
Oct 08
[Closed] Master Internship on Robust Deep Regression
Topic: In this Master thesis we address the problem of how to robustly train a ConvNet for regression, or deep robust regression [1,2]. Traditionally, deep regression employs the L2 loss function [3], known to be sensitive to outliers, i.e. samples that either lie at an abnormal distance away from the majority of the training samples, …
Oct 08
[Closed] Researcher on Deep and Reinforcement Learning for Robotics
Starting Date: February 1st, 2020. Funding: The H2020 ICT SPRING Project Contact Point: Xavier Alameda-Pineda Duration: From 2 and up to 4 years. To apply: https://jobs.inria.fr/public/classic/fr/offres/2019-02083 General Context: SPRING – Socially Pertinent Robots in Gerontological Healthcare – is a 4-year R&D project fully funded by the European Comission under the H2020 framework. SPRING aims to develop …
Oct 08
[Closed] Engineer on Deep Learning and Cloud Computing
Starting Date:November 1st, 2019 – February 1st, 2020. Funding: The H2020 ICT SPRING Project Contact Point: Xavier Alameda-Pineda Duration: 2 years and up to 4 years. To apply: https://jobs.inria.fr/public/classic/fr/offres/2019-02081 General Context: SPRING – Socially Pertinent Robots in Gerontological Healthcare – is a 4-year R&D project fully funded by the European Comission under the H2020 framework. SPRING …