


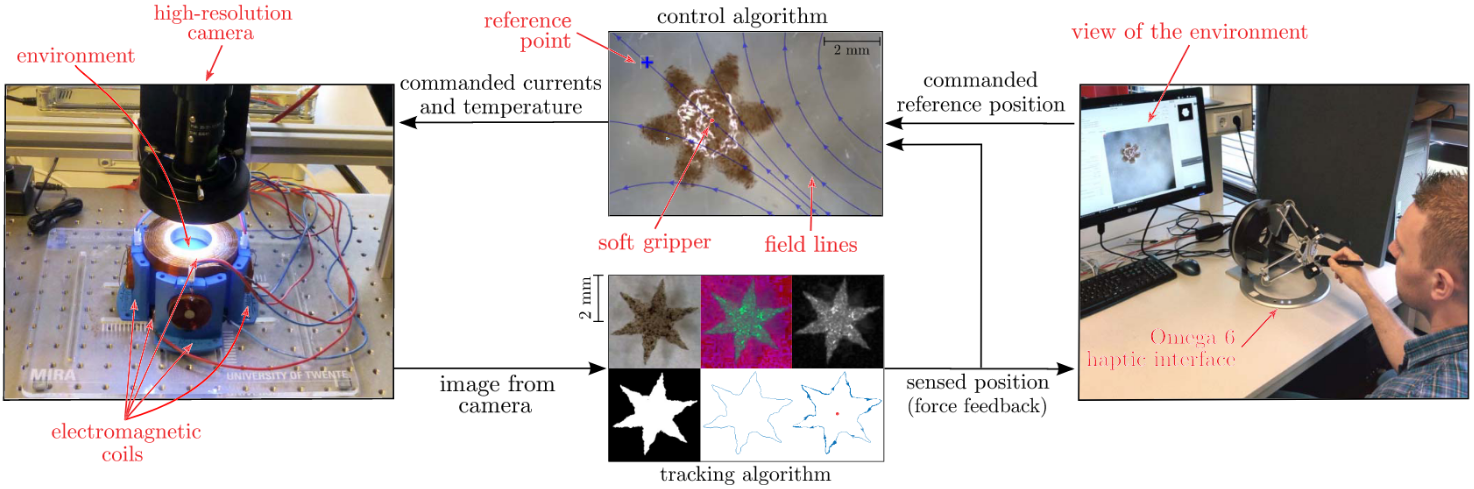
Figure. Example of haptic-enabled teleoperation system for controlling small-scale grippers through dynamic magnetic fields (Pacchierotti et al., 2017). Video available at https://hal.inria.fr/hal-01482255.
Hired by: the Rainbow team at IRISA/Inria Rennes, France
Advised by: Paolo Robuffo Giordano and Claudio Pacchierotti (Rainbow team)
Context
The two positions are open in the framework of the collaborative European project RĔGO (rego-project.eu). The project is composed of eight international partners from four EU countries: CNRS, Inria, CHU Rennes, Haption (France), University of Twente (The Netherlands), Scuola Superiore Sant’Anna, Istituto Italiano di Tecnologia (Italy), Helmholtz-Zentrum Dresden-Rossendorf (Germany).
RĔGO aims at developing an innovative set of AI-powered, microsized, untethered, stimuli-responsive swarms of robots. They will be wirelessly steered through electromagnetic fields as well as respond to other external stimuli, jointly controlled by humans through intuitive multisensory interfaces and by autonomous controllers through AI-based cognitive algorithms. Similarly to ants and multi-drone systems, the RĔGO robots will be able to team up and collaborate to fulfill highly complex tasks in a robust, scalable, and unprecedented flexible way. According to the application at hand, they will deploy in small or large groups, be semi-autonomous or fully teleoperated, and present task- and environment-specific features, e.g., carry drugs or other substances, sense or react to some characteristics of the environment, be biocompatible.
The work will be carried out at IRISA-CNRS in Rennes as part of the Rainbow team, which is internationally recognized for its scientific activity as well as for technology transfer experience in the field of shared control, multi-robots, haptics, sensor-based control, visual tracking, and visual servoing.
Envisaged Activities
Untethered miniature robots have recently shown promising results in several scenarios at the microscale, such as targeted drug delivery, microassembly, and biopsy procedures. However, the vast majority of these small-scale robots have very limited manipulation capabilities, and none of the steering systems currently available enable humans to intuitively and effectively control dexterous miniaturized robots in a remote environment. Moreover, most of the results reported so far concern the control of individual microrobots. It is only recently that the control of swarms of multifunctional microrobots has become possible. Enabling a human user to independently and intuitively control a swarm of microrobots can indeed be beneficial in many scenarios.
The objective of this research work is to enable intuitive and trustworthy human control of untethered multi-robot systems at the small-scale via innovative cognitive-based interfaces and interaction techniques, exploiting multisensory feedback and AI-powered shared control.
The work will address a few of the following points, depending on the expertise and interests of the researcher as well as the advancement of the project:
- Cognitive shared-control: develop shared-control methods to regulate the trade‐off between following human operator’s commands and autonomous control actions during the control of multi-robot systems at the micro-scale.
- Reactive trajectory generation: develop online trajectory generation and re‐planning strategies for (semi) autonomous task execution by means of AI-based constrained optimization problems for multi-robot systems at the microscale.
- Autonomous steering by visual servoing: develop AI-powered visual servoing to generate autonomous (micro-)robotic actions for the shared-control framework.
- Visuohaptic perception: study which set of information to provide using visual feedback and which using haptic feedback during the system operation through perceptual human studies.
- Haptic rendering: design haptic rendering techniques for communicating with the operators, combining kinesthetic feedback with tactile/cutaneous sensations.
- Stability control and trustworthiness: design (passivity-based) stability techniques to guarantee the safety of the microrobotic system; depending on how much we know about the environment, time-domain (less knowledge) and model-based (more knowledge) passivity techniques can be interleaved or combine.
One of the objective of this research work is to address the treatment of aneurysms in endovascular procedures using the above multi-robot approach. Untethered miniature robots have shown promising results in various microscale applications, including targeted drug delivery, microassembly, and biopsy procedures. However, the current steering systems often lack the intuitive and effective control capabilities required for dexterous manipulation of these small-scale robots in remote environments.
Skills/Requirements
- M.Sc. or Ph.D. degree in computer science, robotics, engineering, applied mathematics (or related fields);
- Experience in C/C++ , ROS;
- Experience with robotic control and human-robot interaction;
- Excellent scientific track of record, scientific curiosity, large autonomy, and ability to work independently.
Conditions
The Ph.D. position is full-time for 3 years (standard duration in France).
The PostDoc position is full-time for 1+1 years: upon completion of the first year a renewal will be granted if both parties are satisfied.
The position will be paid according to the French salary regulations for PhD/Postdoctoral scholars (student ~2000 EUR gross/month, postdoc ~2800 EUR gross/month), depending on the candidate’s previous experience.
How to apply
Please apply through this form: https://forms.gle/5gNEpgePNdYPsh5x5
The position will remain open until a satisfactory candidate is found.