Here you can find the currently open positions in the team around human-centered robotics, including human-robot interaction, haptics, telerobotics, assistive robotics.
This topic focuses on advancing haptic shared control systems for manipulating magnetic untethered microrobots via dual robotic arms. These robots, capable of tasks like targeted drug delivery and precision manipulation, operate in complex environments where precision and dexterity are crucial. The challenge lies in achieving seamless integration of human input and robotic assistance to optimize the operator’s control over microrobots in dynamic, cluttered environments. The research will develop a shared control approach that allows human operators to guide microrobots through real-time haptic feedback while an autonomous controller refines trajectory adjustments, obstacle avoidance, and other tasks. Using one robotic arm equipped with a permanent magnet and another with ultrasound imaging, the dual-modality approach enables precise control even in obstructed settings.
This project aims to develop haptic shared autonomy systems for highly dexterous telemanipulation, where human-robot collaboration is essential for precision tasks in complex environments. Telemanipulation systems are used in fields such as medical robotics and industrial automation, where balancing human adaptability with robotic precision is crucial. This research will explore adaptive shared control methods to optimize interaction between human operators and robots. By leveraging sensory feedback and autonomous decision-making, the system will dynamically adjust control based on real-time factors like task complexity and environmental uncertainty. The project focuses on several key areas: cognitive shared control, where the system autonomously manages routine actions while the operator handles complex tasks; autonomous navigation, enabling precise robot movements in constrained environments; and haptic feedback systems that provide realistic tactile sensations to enhance control accuracy. Additionally, robust control techniques will ensure system stability in unpredictable conditions, while human-robot interaction studies will refine usability, focusing on trust, workload, and satisfaction.
This project focuses on advancing haptic shared autonomy for multi-robot systems at the microscale, targeting applications such as microassembly, targeted drug delivery, and endovascular navigation. Although microrobots show promise in these domains, current control systems limit their precision and ease of use, particularly in complex environments. This research aims to bridge these gaps by creating human-robot interfaces and shared-control frameworks that allow intuitive control over untethered microrobots. The project will develop cognitive shared-control methods that balance human input with autonomous decision-making, enabling efficient and precise micromanipulation. Research will include dynamic trajectory optimization and real-time adjustments, essential for handling environmental uncertainties. Additionally, it will explore advanced haptic rendering techniques to deliver realistic tactile feedback, helping operators interact effectively with the microrobots. Visuohaptic feedback systems will integrate visual and haptic cues, enhancing task accuracy and operator immersion. The stability and safety of these microscale interactions will be maintained through robust passivity-based control techniques.
This topic focuses on advancing haptic shared control systems for manipulating magnetic untethered microrobots via dual robotic arms. These robots, capable of tasks like targeted drug delivery and precision manipulation, operate in complex environments where precision and dexterity are crucial. The challenge lies in achieving seamless integration of human input and robotic assistance to optimize the operator’s control over microrobots in dynamic, cluttered environments. The research will develop a shared control approach that allows human operators to guide microrobots through real-time haptic feedback while an autonomous controller refines trajectory adjustments, obstacle avoidance, and other tasks. Using one robotic arm equipped with a permanent magnet and another with ultrasound imaging, the dual-modality approach enables precise control even in obstructed settings.
This project aims to develop haptic shared autonomy systems for highly dexterous telemanipulation, where human-robot collaboration is essential for precision tasks in complex environments. Telemanipulation systems are used in fields such as medical robotics and industrial automation, where balancing human adaptability with robotic precision is crucial. This research will explore adaptive shared control methods to optimize interaction between human operators and robots. By leveraging sensory feedback and autonomous decision-making, the system will dynamically adjust control based on real-time factors like task complexity and environmental uncertainty. The project focuses on several key areas: cognitive shared control, where the system autonomously manages routine actions while the operator handles complex tasks; autonomous navigation, enabling precise robot movements in constrained environments; and haptic feedback systems that provide realistic tactile sensations to enhance control accuracy. Additionally, robust control techniques will ensure system stability in unpredictable conditions, while human-robot interaction studies will refine usability, focusing on trust, workload, and satisfaction.
This project focuses on advancing haptic shared autonomy for multi-robot systems at the microscale, targeting applications such as microassembly, targeted drug delivery, and endovascular navigation. Although microrobots show promise in these domains, current control systems limit their precision and ease of use, particularly in complex environments. This research aims to bridge these gaps by creating human-robot interfaces and shared-control frameworks that allow intuitive control over untethered microrobots. The project will develop cognitive shared-control methods that balance human input with autonomous decision-making, enabling efficient and precise micromanipulation. Research will include dynamic trajectory optimization and real-time adjustments, essential for handling environmental uncertainties. Additionally, it will explore advanced haptic rendering techniques to deliver realistic tactile feedback, helping operators interact effectively with the microrobots. Visuohaptic feedback systems will integrate visual and haptic cues, enhancing task accuracy and operator immersion. The stability and safety of these microscale interactions will be maintained through robust passivity-based control techniques.
In robotic teleoperation, control of the remote robot is often shared between the human user and an autonomous controller. This shared control approach allows the operator to benefit from the support of the autonomous system while retaining a degree of control. The autonomous controller can assist by regulating the robot’s movements and performing autonomous actions to optimize task execution. Haptic feedback is particularly useful in informing the human about the autonomous controller’s actions, enhancing trust and enabling smoother human-machine collaboration. The objective is to devise a shared-control approach that dynamically adapts the allocation of control authority based on the autonomous controller’s confidence and the user’s performance. An input-mixing method is used to weight the inputs from the automation and human operator accordingly. The proposed technique is validated in a robotic cutting task, where users receive haptic feedback about the authority distribution and cutting constraints. This synergy between human and machine improves the overall efficiency of robotic teleoperation and leads to more satisfactory task outcomes.
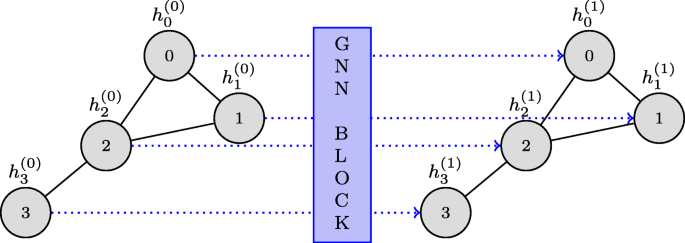
In the context of scarce knowledge and computation constraints, neural networks have become a viable approach to model system dynamics and control actions for multi-robot systems. Graph neural networks (GNNs) have emerged as data-driven models for distributed estimation and control in communicating agent groups. However, a notable drawback of GNNs is the substantial volume of communication variables required to achieve accurate predictions. Inspired by the sparse and specialized neuron architectures observed in biological nervous systems, this research aims to develop a novel neural network topology that minimizes the communication requirements while maintaining effective information encoding. The proposed architecture will take inspiration from the communication mechanisms of living beings, such as birds or fish, which employ dedicated mechanisms for cooperation. The ultimate goal is to create a general framework to learn autonomous policies for complex multi-robot system dynamics. The work will involve benchmark design, model implementation and validation, and real-world deployment on a team of UAVs.
Control of remote interaction systems with force feedback is crucial in robotic teleoperation and virtual/augmented reality. However, these systems are prone to stability issues due to communication delays and environmental factors. Time-domain control approaches leveraging passivity theory have proven successful in designing stabilizing control strategies without requiring a model of the environment. While these methods guarantee stability, they often come at the cost of reduced transparency, or fidelity in force rendering. This research aims to design and evaluate novel time-domain stabilizing control strategies for multidimensional, multi-user teleoperation systems. The objective is to maximize transparency through online optimization, while ensuring stability. The work will involve theoretical development, software implementation, and experimental evaluation of the proposed control strategies on real-world teleoperation systems.
The integration of sensory feedback, particularly thermal haptic feedback, has become a key focus in enhancing user immersion and interaction in virtual reality (VR). Unlike traditional haptic feedback relying on vibrations or force, thermal haptic feedback introduces temperature sensations to simulate warmth, coolness, and subtle temperature changes within the virtual environment. This technology provides users with a greater sense of presence and realism, enabling more immersive scenarios. This research aims to design a thermal hand-held haptic interface and evaluate its effectiveness in a VR setting. The work will address the mechatronic development of the haptic device, the design of thermal haptic rendering algorithms, and the human-subject evaluation of the proposed techniques in an immersive VR scenario.
In virtual reality (VR), pressure and vibrotactile haptic feedback have emerged as important components. Pressure feedback introduces a dynamic dimension by simulating the sense of resistance or force against user interactions, while vibrotactile feedback engages users through subtle vibrations, replicating textures and surfaces encountered in the digital realm. Recent advancements in haptic actuators, such as electroactive polymer technology, enable the provision of both soft pressure and sustained vibrations through a compact and flexible package. This research aims to design a hand-held haptic interface integrating electroactive polymer actuators and evaluate its effectiveness in a VR setting. The work will address the mechatronic development of the haptic device, the design of pressure and vibrotactile haptic rendering algorithms, and the human-subject evaluation of the proposed techniques in an immersive VR scenario.
This website uses cookies so that we can provide you with the best user experience possible. Cookie information is stored in your browser and performs functions such as recognising you when you return to our website and helping our team to understand which sections of the website you find most interesting and useful.
Strictly Necessary Cookies
Strictly Necessary Cookie should be enabled at all times so that we can save your preferences for cookie settings.
If you disable this cookie, we will not be able to save your preferences. This means that every time you visit this website you will need to enable or disable cookies again.