



The Inria Nancy Research Center has been supporting since 2010 the design and the construction of an innovative platform for favouring research in assistance for elderly people at home. This platform has been mainly funded by the CPER MISN of the Lorraine region, with the project Info-Situ (2010-2013). It consists of a standard apartment type F2 (kitchen, bathroom, bedroom and living room), with several “smart and connected devices” as sensor networks.

This platform has been designed to make technical experimentations easier in an environment which is as close as possible to reality. Many technical developments have been done during the IPL PAL. In particular, the team led by F. Charpillet has been working both (1) on the development of new algorithms to exploit/connect the sensors and the devices, and (2) on the effective deployment of different kind of connected devices:
– A network of depth cameras. These depth cameras are either fixed on the wall or are placed on-board wheeled mobile robots. One important achievement has been to connect these cameras to the ethernet network, each camera being considered as a ROS node with computation capabilities (using a NUC for each node). Another achievement has concerned the automatic calibration of theses cameras. Today 7 cameras cover completely the main living and kitchen area of the sensorized “smart” apartment (HIS – habitation intelligente pour la santé). A network of Qualisys motion capture cameras is also covering the apartment, to provide ground truth and precise robot and human tracking.

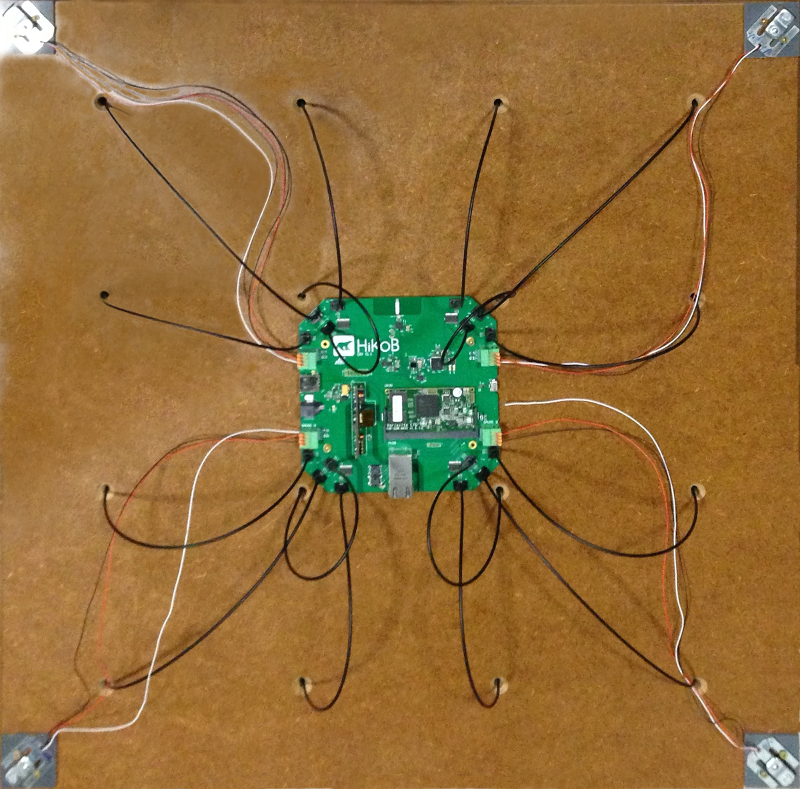
– Pressure sensing tiles have been designed by Charpillet’s team in cooperation with Hikob and the Inria SED of Grenoble during the Pal evaluation period. Ninety tiles cover the floor of our experimental platform (HIS): by those tiles, we can track the activity of people or robots moving on the floor.

Highlights:
- Andries, F. Charpillet, O. Simonin (2015). High Resolution Pressure Sensing Using Sub-Pixel Shifts on Low Resolution Load-Sensing Tiles. In Proc. of the IEEE International Conference on Robotics and Automation.
- Vincent, A. Sini, F. Charpillet (2015) Audio source localization by optimal control of a mobile robot. IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP).
- Dubois, F. Charpillet (2014) A Gait Analysis Method Based on a Depth Camera for Fall Prevention. The 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBS).
- Dib, N. Beaufort, F. Charpillet (2014) A real time visual SLAM for RGB-D cameras based on chamfer distance and occupancy grid. In Proc. of the International conference on advanced intelligent mechatronics, pp. 652 – 657.