



The hexapods (6-legged robots) are mainly used in the Resibots project (see Projects).
The last version of our 6-legged robot, which was featured on the cover of Nature (see Publications). This 6-legged robot is made with 18 MX-28 dynamixel actuators, a Xsens Mti-30 IMU, and a Asus x-tion (RGB-D sensor / Kinect). The silver spheres on top of the x-tion are for the motion tracking.
This robot is a demonstrator and a testbed for our adaptation algorithms. It has no direct intended application, but the algorithms that we test with it have appplications.
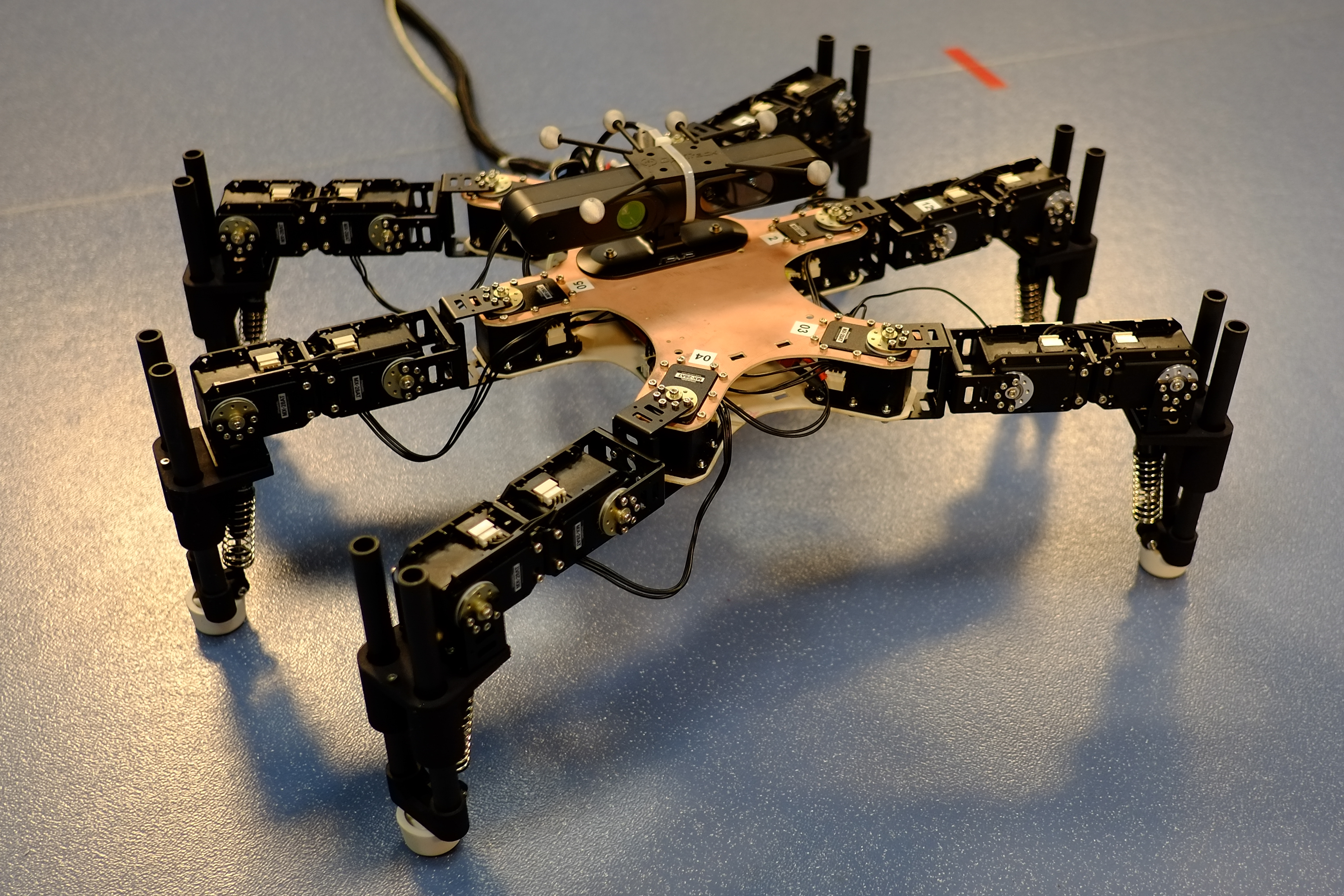
(click on the photo for full resolution)
The Creadapt robot is wheel-leg hybrid robot that was developped in a previous project (ANR Creadapt). It is bigger than our 6-legged robot, and it has many more ways to move (drive, walk, …).
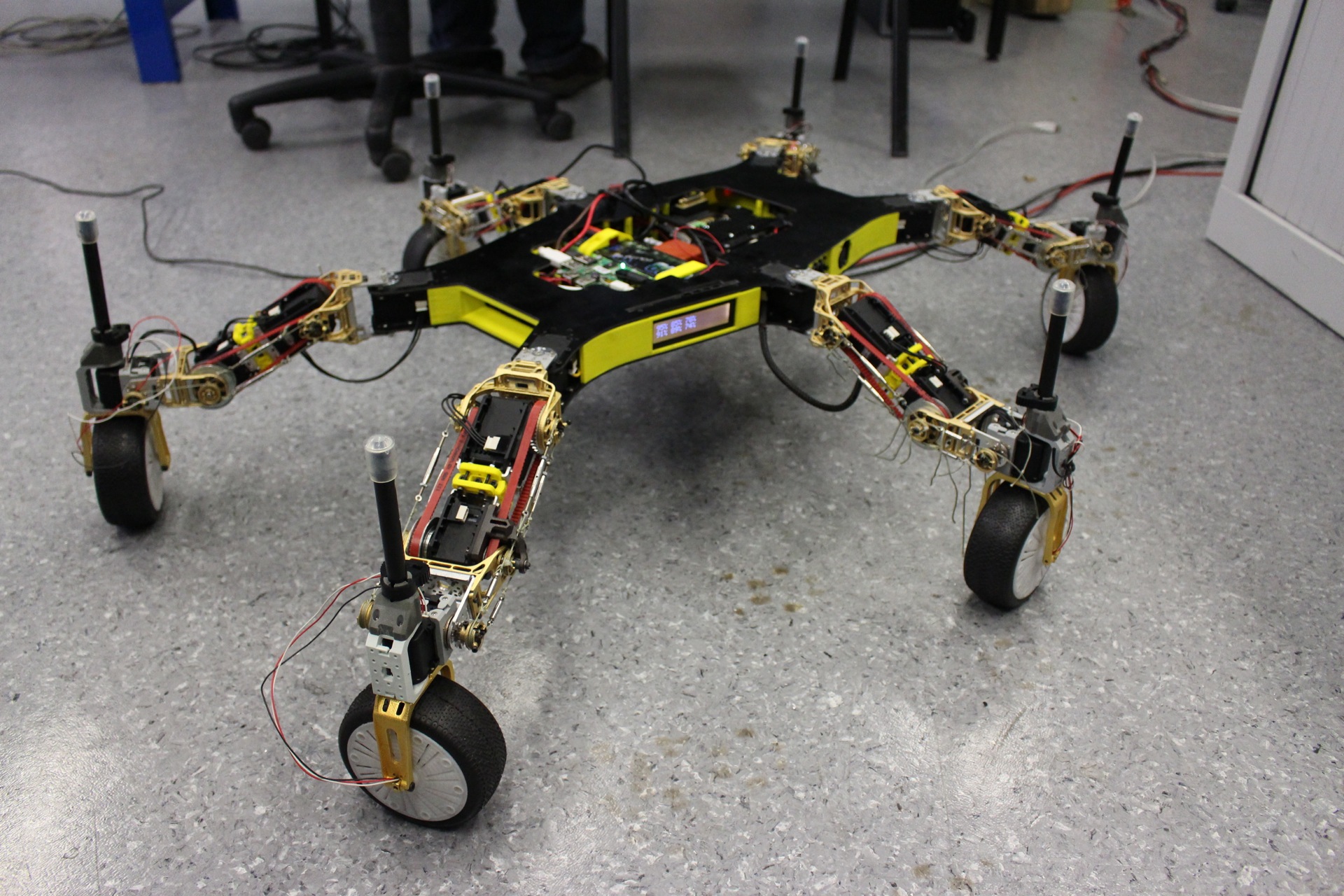
(click on the photo for full resolution)