




Whole-Body Compliant Dynamical Contacts for Cognitive Humanoids
(EU FP7 STREP, call ICT; 01/03/2013 – 28/02/2017)
The aim of CoDyCo is to advance the current control and cognitive understanding about robust, goal- directed whole-body motion interaction with multiple contacts. CoDyCo will go beyond traditional approaches: (1) proposing methodologies for performing coordinated interaction tasks with complex systems; (2) combining planning and compliance to deal with predictable and unpredictable events and contacts; (3) validating theoretical advances in real-world interaction scenarios with the iCub humanoid robot engaged in whole-body goal-directed tasks. The evaluations will show the iCub exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilizing assistive physical interaction.
Contact
Partners
- Italian Institute of Technology (Francesco Nori – coordinator)
- University of Birmingham (Mike Mistry)
- Université Pierre et Marie Curie (Vincent Padois)
- Josef Stefan Institute (Jan Babic)
- TU Darmstadt (Jan Peters)
Highlights
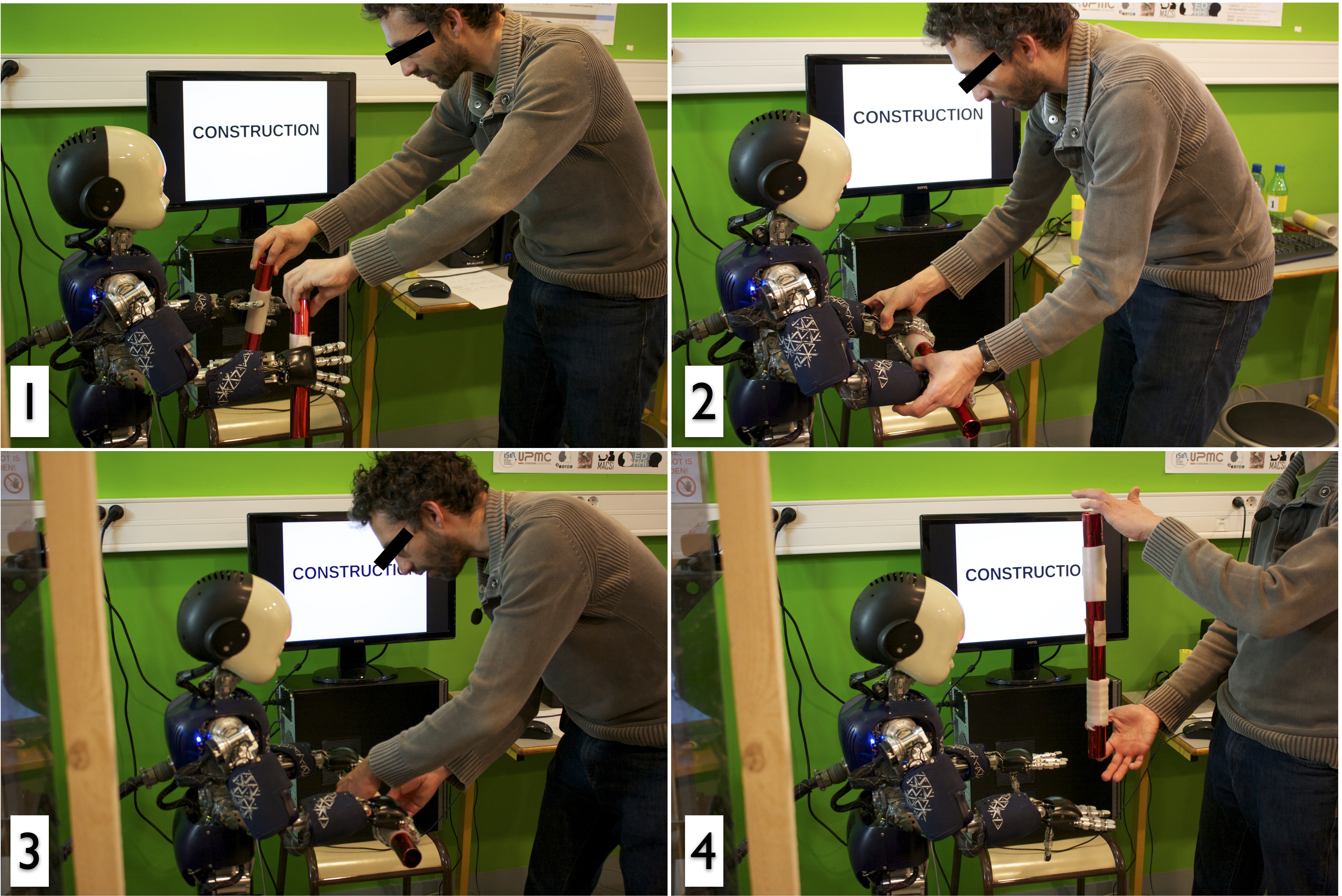
Cooperative assembly task between humans and the humanoid robot iCub – from Ivaldi et al. (2016)

Learning task priorities for optimizing whole-body motions while ensuring that constraints are never violated – from Modugno et al. (2016)
Main publications
- Padois, V.; Ivaldi, S.; Babic, J,; Mistry, M.; Peters, J.; Nori, F. (2016) Whole-body multi-contact motion in Humans and Humanoids: Advances of the CoDyCo European project. Robotics and Autonomous Systems.
- Ivaldi, S.; Lefort, S.; Peters, J.; Chetouani, M.; Provasi, J.; Zibetti, E. (2016) Towards engagement models that consider individual factors in HRI: on the relation of extroversion and negative attitude towards robots to gaze and speech during a human-robot assembly task. Int. Journal of Social Robotics.
- Ivaldi, S.; Babic, J.; Mistry, M.; Murphy, R. (2016) Special Issue on Whole-body control of contacts and dynamics for humanoid robots. Autonomous Robots, vol. 40, n.3, pp. 425-428.
- Modugno, V.; Chervet, U.; Oriolo, G.; Ivaldi, S. (2016) Learning soft task priorities for safe control of humanoid robots with constrained stochastic optimization. Proc. IEEE/RAS International Conf. on Humanoid Robots (HUMANOIDS).
- Modugno, V.; Neumann, G.; Rueckert, E.; Oriolo, G.; Peters, J.; Ivaldi, S. (2016) Learning soft task priorities for control of redundant robots. Proc. IEEE International Conf. on Robotics and Automation (ICRA).
- Calandra, C.; Ivaldi, S.; Deisenroth, M.P.; Peters, J. (2015) Learning Torque Control in Presence of Contacts using Tactile Sensing from Robot Skin. Proc. IEEE/RAS International Conf. on Humanoid Robots (HUMANOIDS).
- Calandra, R.; Ivaldi, S.; Deisenroth, M.P.; Rueckert, E.; Peters, J. (2015). Learning Inverse Dynamics Models with Contacts, Proc. IEEE International Conference on Robotics and Automation (ICRA).