



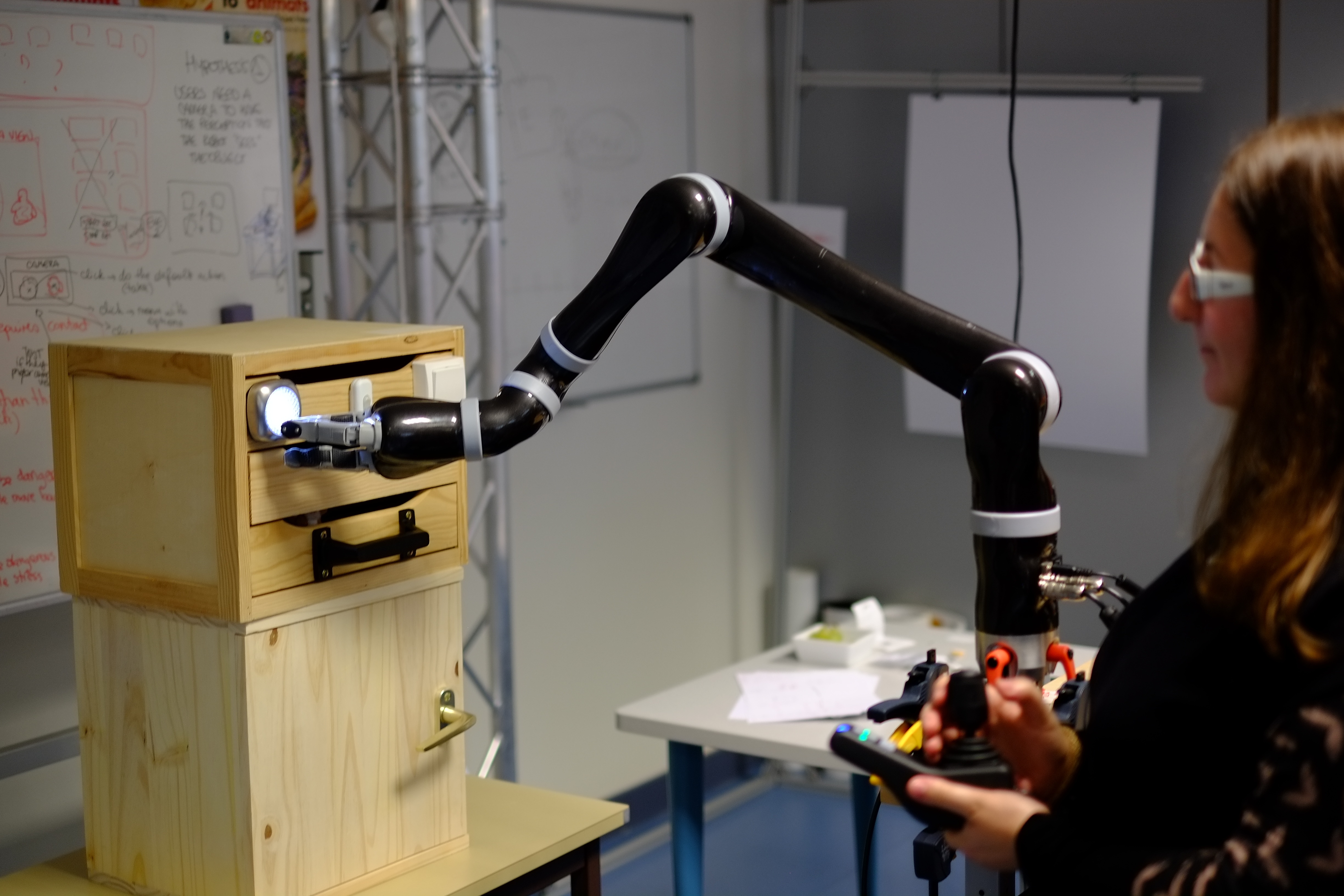
Jaco is a lightweight 6-DOF robotic arm, produced by Kinova robotics. It has 3 fingers and a 1,5 kg payload. Its base can be mounted on an electric wheelchair or on a desk. We are using it for motion optimization and for human-robot interaction experiments.
Highlights:
- Marichal*, S.; Malaise*, A.; Modugno, V.; Dermy, O.; Charpillet, F.; Ivaldi, S. (2016) One-shot Evaluation of the Control Interface of a Robotic Arm by Non-Experts. Proc. International Conf. on Social Robotics.
- Modugno, V.; Neumann, G.; Rueckert, E.; Oriolo, G.; Peters, J.; Ivaldi, S. (2016) Learning soft task priorities for control of redundant robots. Proc. IEEE International Conf. on Robotics and Automation (ICRA).