



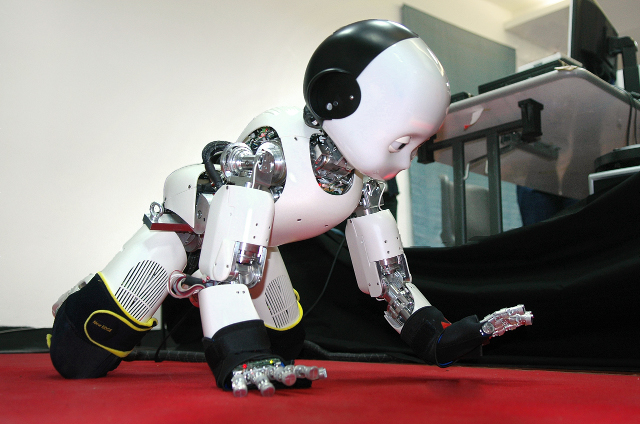
iCub is a child-like humanoid robot with 53 actuated degrees of freedom. It is equipped with two cameras, several force/torque sensors, inertial sensors and a sensitive skin with distributed tactile elements. Our version has brand new legs that make it possible balancing and walking.
In the CODYCO project, we use it to study whole-body control, physical interaction with the environment, and human-robot interaction.
In the Resibots project, we use it to test our algorithms for 4-legged crawling and 2-legged walking.
In the ANDY project, we use it to study human-robot collaboration in dynamic tasks with several constraints.
Software:
- Our iCub manual: https://github.com/inria-larsen/icub-manual/wiki
Highlights:
- Ivaldi, S.; Lefort, S.; Peters, J.; Chetouani, M.; Provasi, J.; Zibetti, E. (2016) Towards engagement models that consider individual factors in HRI: on the relation of extroversion and negative attitude towards robots to gaze and speech during a human-robot assembly task. Int. Journal of Social Robotics.
- Gaudiello, I.; Zibetti, E.; Lefort, S.; Chetouani, M.; Ivaldi, S. (2016) Trust as indicator of robot functional and social acceptance. An experimental study on user conformation to the iCub’s answers. Computers in Human Behavior, vol. 61, pp. 633-655.
- Calandra, C.; Ivaldi, S.; Deisenroth, M.P.; Peters, J. (2015) Learning Torque Control in Presence of Contacts using Tactile Sensing from Robot Skin. International Conf. on Humanoid Robots (HUMANOIDS).
- Calandra, R.; Ivaldi, S.; Deisenroth, M.P.; Rueckert, E.; Peters, J. (2015) Learning Inverse Dynamics Models with Contacts. Proc. IEEE International Conference on Robotics and Automation (ICRA).