


Half-day workshop on “Wearable and portable haptics for VR and AR” – 2018 IEEE VR
Abstract
In the last decade, we have witnessed a drastic change in the form factor of audio and vision technologies, from heavy and grounded machines to lightweight devices that naturally fit our bodies. Think, for instance, of the first hi-fi speakers, and compare them to the latest portable music players. The same applies to technologies made to reproduce and transmit video signals. From the first cathode ray tube televisions, nowadays companies are developing flexible organic light-emitting diode screens, which can be easily shipped in rolls.
However, only recently, haptic systems have started to be designed with wearability and portability in mind. The wearability and portability of haptic systems enable novel forms of communication, cooperation, and integration between humans and machines. Compact, unobtrusive, inexpensive, easy-to-wear, and lightweight haptic devices enable researchers to provide compelling touch sensations to multiple parts of the body, significantly increasing the applicability of haptics in many fields, such as robotics, rehabilitation, gaming, and immersive systems. In this respect, wearable and portable haptics have a particularly great potential in the fields of virtual and augmented reality. Being able to touch virtual objects in a wearable and unobtrusive way may indeed open new exciting avenues for the fields of haptics and VR. Development of these types of haptic devices is quite active, and we can already see applications targeting VR and AR immersive scenarios.
This workshop presents a review of wearable and portable haptic systems for VR and AR applications. We will discuss the main technological and design challenges for the development of such haptic interfaces, we will discuss on new interaction techniques devoted to address their intrinsic limitations, and we will report on the future perspectives for the field.
Tentative Program
| 13.30 – 13.40 | Welcome by the organizers |
| 13.40 – 14.00 |
Claudio Pacchierotti (CNRS, France), “Wearable fingertip haptics for Virtual Reality” ↓
Abstract
Virtual Reality is an application that can greatly benefit from wearable haptics, e.g., a haptic vest can replicate the feeling of being hit by bullets in First Person Shooters (FPS) games, vibrotactile bracelets can reproduce the vibrations of the steering wheel of a race car driven in rough terrain, and fingertip devices can alter the perception of tangible objects’ mechanical properties, making them feel more heavy or slippery. This talk will present my recent work in the field, focusing on presenting our wearable fingertip devices. 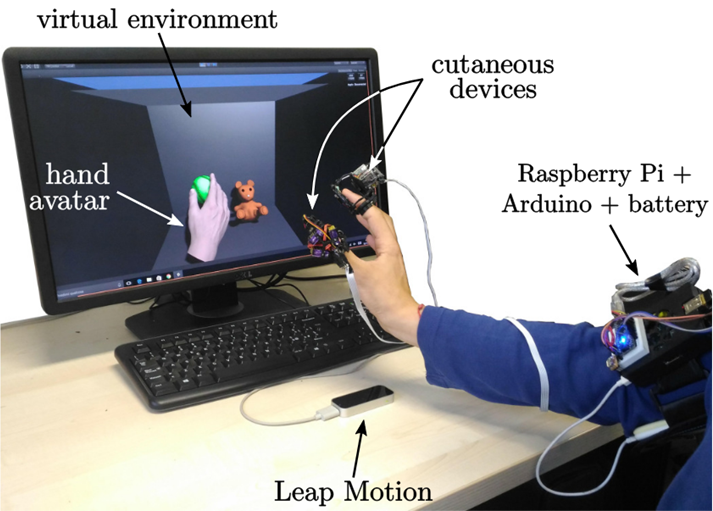
|
| 14.00 – 14.20 |
Domenico Prattichizzo (University of Siena, Italy), “Wearable haptic rings to provide unobtrusive tactile stimuli in Mixed Reality” ↓
Abstract
Wearability is a determining factor to design new interfaces that will simplify and enhance the way humans interact with digital and physical worlds. I will introduce the scientific and technological foundations for wearable haptics and I will show how wearability is redefining the way we communicate and interact with physical and digital worlds. In the last few years we have developed devices with different form factors such as thimbles, rings and armbands. While the haptic thimble design has been proved to be very effective to display haptic cues in VR, the haptic ring has been the first device we proposed which is explicitly designed for Augmented Reality. The haptic ring leaves the fingertip free to interact with the physical objects while applying shearing forces to the base of the finger. I will introduce the most recent developments about the design and the applications of our haptic thimbles and rings. The tradeoff between realism and wearability is one of the most challenging aspects of our research. Clearly, when the goal is to simulate fingertip interactions in VR environments, the haptic thimbles outperform the haptic rings: indeed, the latter display tactile cues at the base of the finger, where they are not expected to be. On the other hand, the usability of the rings is much more interesting than thimbles as for example while wearing them you can type on your keyboard with no need to take off the thimbles from your fingertips. Finally I will introduce an example of how the haptic rings can be integrated with helmets for augmented reality. |
| 14.20 – 14.40 |
Eyal Ofek (Microsoft Corp, USA), “Haptic controllers for VR” ↓
Abstract
The capabilities of current interaction devices to render meaningful haptics lag far behind their abilities to render highly realistic visual or audio content. I will present a series of handheld haptic VR controller prototypes that allows a multifunctional haptic rendering. CLAW augments the typical controller functionality with force feedback and actuated movement to the index finger. Our controller enables three distinct interactions (grasping virtual object, touching virtual surfaces, and triggering) and changes its corresponding haptic rendering by sensing the differences in the user’s grasp. Haptic Revolver renders fingertip haptics when interacting with virtual surfaces using an interchangeable actuated wheel that raises and lowers underneath the finger to render contact with a virtual surface. Haptic links extend the haptic rendering to bimanual operations. |
| 14.40 – 15.00 |
Eric Vezzoli (GoTouchVR, France), “Wearable haptics interfaces: constraints and challenges for mass market implementation” ↓
Abstract
The recent democratization of VR HMDs is opening an incredible opportunity to revolution several aspects of business and entertainment with virtual and augmented reality. One of the biggest challenges associated with the success of these technologies it moving towards a natural interaction with virtual objects to decrease the entry barrier to the technology, and facilitate the adoption on the large scale. Well designed haptics interfaces are capable to deliver a compelling touch illusion driving the user to act naturally while grabbing or pushing objects, but the biggest challenges regards the ability to deliver a stable and repeatable interaction experience to multiple users. In this talk, several challenges regarding the design of such haptics interfaces will be treated and solutions proposed. |
| 15.00 – 15.30 | Break & Coffee (some of the speakers will present hands-on demonstrations of their work) |
| 15.30 – 15.50 |
Miguel Otaduy (URJC, Spain), “Touching virtual environments through soft hands” ↓
Abstract
Lorem ipsum.  |
| 15.50 – 16.10 |
Anatole Lécuyer (Inria, France), “Wearable haptics based on passive and pseudo-haptic feedback” ↓
Abstract
In this talk we will present our recent approach for wearable haptics which explores an alternative path combining passive and pseudo haptic feedback. This novel approach enables to simulate a wide range of haptic sensations in a simple and cost-effective manner, by relying on passive handheld devices associated with visual effects. We will notably describe how our “Virtual-Mitten” and “Flexi-Fingers” interaction paradigms have been conceived and how they successfully simulate grasping or elasticity sensations. 
|
| 16.10 – 16.30 |
Manuel Cruz (Immersion Corp, Canada), “Portable and wearable haptic interfaces in industry” ↓
Abstract
The evolution of haptic interfaces for mass market commercial applications has been tied to the evolution of gaming and now mobile and VR/AR industries. In this talk, a brief history of recent haptic interfaces in gaming, mobile and VR will be presented, followed by some innovations developed at Immersion’s Research Lab to create portable and wearable haptic interfaces that use actuation beyond electro-magnetic motors. |
Participate
The workshop will be held on March 19 2018, as part of the IEEE VR conference (http://ieeevr.org/2018).
![]()
Organizers
 |
Dr. Claudio Pacchierotti, Centre National de la Recherche Scientifique (CNRS)
Claudio is a CNRS Chargé de Recherche (CRCN) in Rennes, France, since December 2016. He received the B.S., M.S., and Ph.D. degrees from the University of Siena, Italy in 2009, 2011, and 2014, respectively. He has been a postdoctoral researcher of the Dept. of Advanced Robotics of the Italian Institute of Technology, Genova, Italy in 2015 and 2016. He visited the University of Padua, University of Pennsylvania, and the University of Twente in 2013, 2014, and 2015, respectively. He received the 2014 EuroHaptics Best PhD Thesis Award for the best doctoral thesis in the field of haptics, and the 2015 Meritorious Service Award for his work as a Reviewer for the IEEE Transactions on Haptics. He has also been Associate Editor for the 2017 IEEE World Haptics conference as well as the Publicity Chair for the 2017 IEEE World Haptics and 2018 Asia Haptics conferences. He is the Chair of the IEEE Technical Committee on Haptics. |
 |
Prof. Miguel Otaduy, Universidad Rey Juan Carlos (Spain)
Miguel received the B.S. degree in electrical engineering from Mondragon Univesity, in 2000, and the M.S. and Ph.D. degrees in computer science from the University of North Carolina, Chapel Hill, in 2003 and 2004, respectively. He is an associate professor in the Department of Computer Science, Universidad Rey Juan Carlos (URJC Madrid), where he leads the Multimodal Simulation Lab. From 2005 to 2008, he was a research associate with ETH Zurich. His research interests extend across physics–based simulation, covering algorithmic design or applied problems for virtual touch, animation, fashion, computational medicine, or fabrication. He has served on the editorial board of several journals and conferences, most notably the IEEE Transactions on Haptics, the IEEE Transactions on Visualization and Computer Graphics, 2013-2019 IEEE World Haptics Conference, 2013 ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, and 2010 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. He is the Co-Chair of the IEEE Technical Committee on Haptics for the term 2015 – 2017. Email: miguel.otaduy@urjc.es |
 |
Prof. Domenico Prattichizzo, University of Siena (UNISI) and Italian Institute of Technology (IIT)
Domenico is Professor of Robotics at the University of Siena, Senior Scientist at the Istituto Italiano di Tecnologia in Genova, Fellow of the IEEE society, and Co-founder of the startup WEART, a startup for VR and AR applications. Human and robotic hands together with the art of manipulating real and virtual objects have always polarized his research that has recently focused on wearable haptics, VR/AR and wearable robotics. He founded the SIRSLab where he has been leading an extraordinary and enthusiastic research team for years. Since 2013, he co-ordinates the strategic project “ WEARHAP: wearable haptics for humans and robots ” founded by the European Community with 7.5MEuros with applications on virtual and augmented realities and to collaborative robotics. In 2010 he co-ordinated the project on “REMOTOUCH: remote touch” tactile communication, selected for the presentation at Expo Shangai 2010 under the initiative of “Italia degli Innovatori” promoted by the Ministry of Innovation. Awarded in 2014 with the MathWorks Education Award. In 2017, in Phoenix, his project “the Robotics Sixth Finger” was selected among the best innovative projects at the Wearable Robotics Association Conference, wearRAcon. He has held many plenary talks on robotics, including the most recent at the International Conference on Robotics and Automation (2016) and the International Conference on Asia Haptics (2017) where he won the award fir his research activities in virtual reality. He has been selected among the best two Cross-Cutting Challenges Initiatives at the IEEE Haptic Symposium 2018 in San Francisco (http://2018.hapticssymposium.org/crosscuttingchallenges) with the theme “The path to intelligent clothes and objects able to change the way we communicate with the world”. Author of more than 250 scientific articles in the field of robotics and virtual reality Email: prattichizzo@diism.unisi.it |


![]()
![]()
