
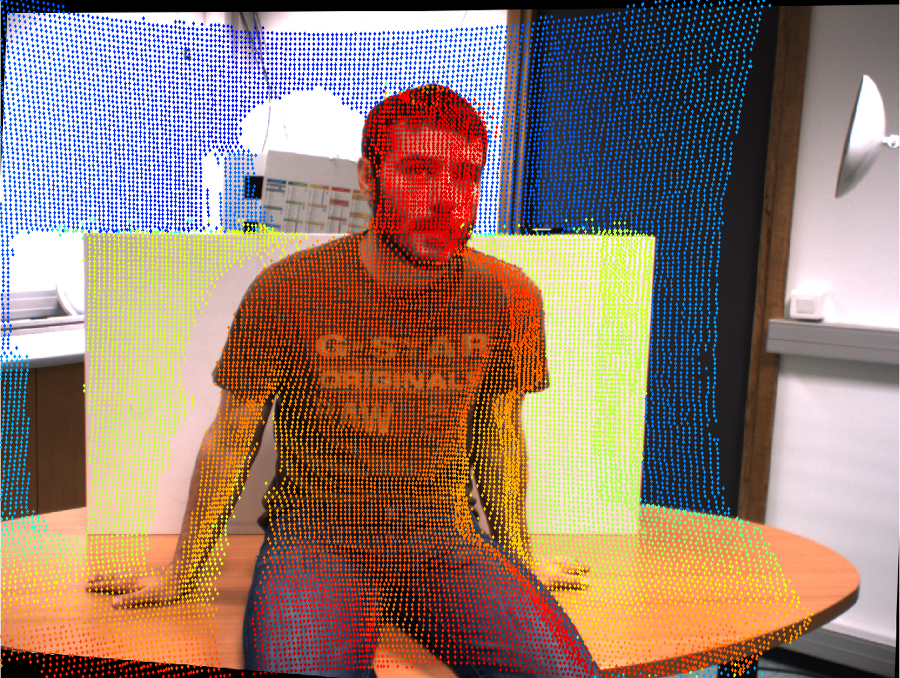
Mixcam data-set consists of five scenes that are captured by a three-sensor camera including a low-resolution (176×144) Time-of-flight (range) camera and two high-resolution (1624×1224) color cameras (TOF+Stereo). The tof sensor is the SR4000 model by Mesa Imaging. The inter-sensor syncronization is very accurate owing to a specific hardware developed by 4D View Solution. We also provide calibration matrices along with a Matlab script that allows the projection of the low-resolution depth data into the high-resolution stereo frame (please see the README file of the package provided below).


Download the Mixcam data-set from HERE
You are kindly requested to cite the following papers if you plan to use this data-set for your research.
[1]: G. Evangelidis, M.Hansard, R. Horaud, Fusion of Range and Stereo Data for High-resolution Scene-modeling, IEEE TPAMI, 37(11), pp.2178-2192, 2015
[2]: M. Hansard, G. Evangelidis, Q. Pelorson, R. Horadu, Cross-Calibration of Time-of-flight and Colour Cameras, CVIU, vol. 134, pp.105-115, 2015