|
I am a Professor of Computer Science at University Joseph Fourier, Grenoble, doing research at INRIA,LJK-CNRS. My research work addresses Physical Simulation for Computer Graphics, both from a modelling and a computational perspective. My recent work includes new deformation models for continuous media mechanics, GPU accelerated collision detection and response, software architecture for heterogeneous simulation, and parallelization on hybrid hardware architectures. I am one of the lead architects of the SOFA simulation library. |
||
| Research | My Publications | Teaching | |
| Contact/Visit me | Stages/Internships & Jobs | ||
Research
- My current interests include, but are not limited to: deformable models, contact detection and modeling, simulation software architecture, in collaboration with numerous co-authors. The following is a selection of my recent work. See also my complete publication list.
Deformable Models
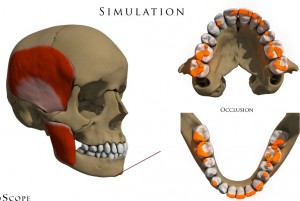
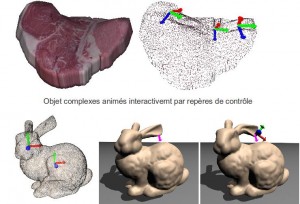
Physically accurate deformable models are usually designed using Finite Elements (with meshes) or Particle Systems (without meshes). To alleviate the well-known meshing and discretization issues, we have developed frame-based meshless models. They combine the physical soundness of continuous media mechanics used in physics with the ease of skeleton-based deformations used in traditional computer animation. Recently, we have been using these methods to morph anatomical models. Click on the following images to access the associated pdf, images and videos.
 |
 |
|
| TOG 2011 | SIGGRAPH 2011 | SIGGRAPH ASIA 2013 |
Contact Detection and Modeling
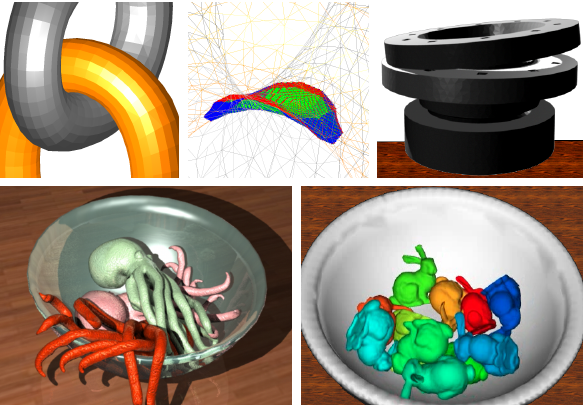
Traditional distance-based collision detection and response is hard because the detection inherently has a quadratic complexity, and penetration depth is a complex, ill-posed problem. We tackle these challenges using a discrete depth-based intersection detection and the minimization of the intersection volume. This allows very efficient implementations on the GPU which return not only a list of contacts, but also repulsion directions. Click on the following images to access the associated pdf, images and videos.
 |
 |
 |
| SCA 2008 | SIGGRAPH 2010 | SIGGRAPH 2012 |
Simulation Software
Programming mechanical simulations for computer graphics requires skills in various domains such as mechanics, numerics, geometry, graphics, etc. We have proposed a modular software architecture inspired from graphical scene graphs, which allows programmers to focus on their own domain of competence while easily combining and re-using modules created by others. This is available in the open-source SOFA simulation library, increasingly popular in the Computer Graphics and Medical Simulation domains.
 |
 |
| MMVR 2007 | Springer 2012 |
PhD students: Florence Zara, Laks Raghupathi, Matthieu Nesme, Cécile Picard, Everton Hermann, Guillaume Bousquet, Bui Huu Phuoc, Marie Durand, Dicko Ali-Hamadi, Richard Malgat, Pierre-Luc Manteaux
Stages/Internships 2015-2016
N’hésitez pas à me contacter si ces sujets vous intéressent, même si votre profil est différent de ceux indiqués.
- M1, M2, IUT2: Entretien et Exploitation d’une Ontologie Anatomique
- M2 pro, PFE ingénieur: Modélisation maxillo-faciale
- Master internship: Procedural Generation of Anatomical Detail
- Master internship: Modelage bimanuel d’objets virtuels
Teaching
M1-MAI – Synthèse d’images
M2R-MOSIG – Computer Animation
M2-MIA – Outils Informatiques
M2-MIA – Animation and Image Synthesis
M1-Informatique – Computer Animation
L3 – MIAM – Synthèse d’images 3D
TU Wien – Computer Animation
Miscellaneous interesting stuff
Contact
![]()
Phone: +33 (0)4 76 61 54 33
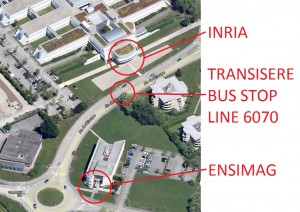
My office is located at Inria-Grenoble in Montbonnot, at this place.
Post: IMAGINE-INRIA, 655 avenue de l’Europe, F-38334 Montbonnot Cedex
Training and education, appointments held
- 1992 M.Sc. Computer Science, University Paris XI, France.
- 1993 Agrégation (competitive examination for College professorship) in Mechanics, École Normale Sup. de Cachan
- 1994-1997 : Lecturer, University of Grenoble
- 1997 Ph.D. Computer Graphics, University of Grenoble, France (advisor: Claude Puech)
- 1999-20011 : Assistant Professor, University of Grenoble
- 2008 Habilitation Computer Science, University of Grenoble.
- 2010-2012: Invited Scientist/Professor at UBC, Vancouver
- since 2011 : Professor, Grenoble University