The IMAGINE team develops internally some Softwares for research purposes.
RUMBA

Rumba is a 3D animation software that we are developing with
- Mercenaries Engineering: Developer of 3D solution software Guerilla Render
- Teamto animation studio
Rumba speeds up significantly the process of animating rigged characters with a real-time playback amongst other. The close collaboration with Teamto’s artists makes sure that new features really fit their needs.
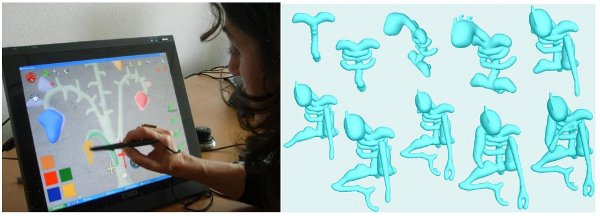
Our contribution to this software is a prototype of Sketch-Based Posing and Animation techniques on full body rigged character.
Teamto’s new series animated on Rumba : Mighty Mike
Recent article on CGPress
MOTION LINES
Motion Lines is a demonstrator of Martin Guay’s thesis results. It’s permanently located in Login Space at Inria Montbonnot. It is about sketching poses and trajectory of a basic rigged character thanks to lines of action.
The video below shows Julien and Maguelonne (engineers of our team) explaining the purpose of these research results at Inria 50th birthday in November 2017.
AANALYSIS – MyProductFabrica
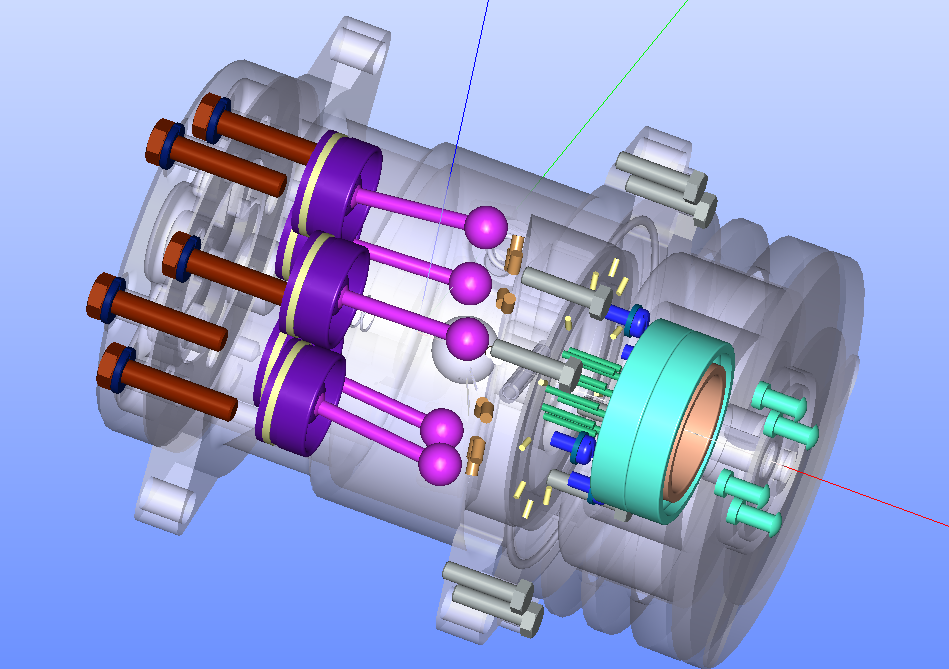
Mechanical assembly
AANALYSIS (Assembly Analysis) is C++ library devoted to the geometric analysis of mechanical assemblies. It is integrated as a module into SALOME platform using OpenCascade library.
AANALYSIS extracts sets of identical components, families of components, interfaces between components, symmetry properties of components and assemblies. AANALYSIS is connected to an ontology-based knowledge base.
The ontology, MyProductFabrica, associated with AANALYSIS features 400 concepts, 80 relations and over 100 inference rules. On purpose with AANALYSIS, the inferencing system enrichies automatically the assembly with functional designations of components as well as behavioral and functional information. It is developed in partnership with Inria Graphik team using GRAAL and Cogui.
SOFA 
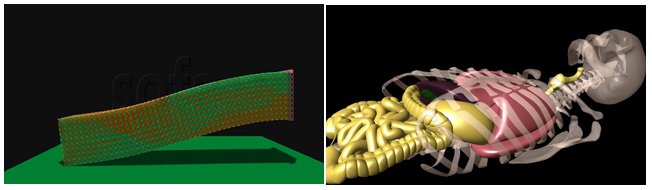
SOFA (Simulation Open Framework Architecture) is a C++ library primarily targeted at medical simulation research. Based on an advanced software architecture, it allows to
- Create complex and evolving simulations by combining new algorithms with algorithms already included in SOFA.
- Modify most parameters of the simulation deformable behavior, surface representation, solver, constraints, collision algorithm, etc. – by simply editing an XML file.
- Build complex models from simpler ones using a scene-graph description.
- Efficiently simulate the dynamics of interacting objects using abstract equation solvers.
- Reuse and easily compare a variety of available methods.
SOFA is currently developed by 3 INRIA teams: Imagine, Shacra and Asclepios but the project also benefited from the help of the CIMIT Sim Group, ETH Zurich and CSIRO.

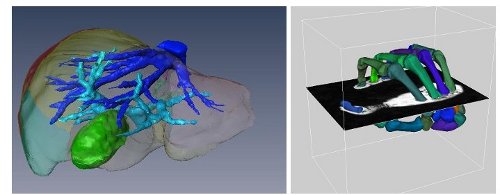
MyCorporisFabrica
83 000 Classes, 5 type of relations, 125 000 relations, 34 type attributes.
AESTEM Studio