





Objectives
Our team aims at providing a novel approach to model and control soft robots. The methods used to control rigid robots are not directly relevant and new approaches have to be invented or updated to be applied to this kind of robots. We study both kinematics and dynamics control of soft robots.
From the kinematic equations, we deduce the soft-robot Jacobian matrix and discuss the conditions to avoid singular configurations. We also propose a novel observer based control methodology where the observer is built by Finite Element Model. A closed-loop controller for position control of soft robot is designed based on the discrete-time model with feedback signal being extracted by means of visual servoing.
Considering the dynamics of the robots, based on real-time Finite Element Method (FEM), we obtain a model in the workspace of soft robots. We then use Model Order Reduction to get a system of reasonable size to control both velocity and position of the soft robot.
Related papers & videos
Journal articles:
 Control Design for Soft Robots based on Reduced Order Model
Control Design for Soft Robots based on Reduced Order Model
M. Thieffry, A. Kruszewski, C. Duriez and T.M. Guerra
IEEE Robotics and Automation Letters, 2019, Pdf
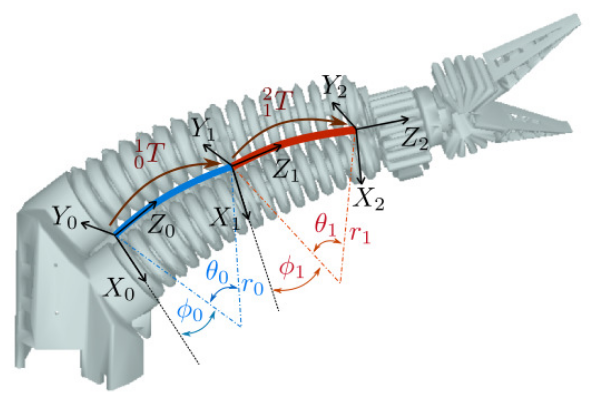
 Motion Control of Cable-Driven Continuum Catheter Robot through Contacts
Motion Control of Cable-Driven Continuum Catheter Robot through Contacts
Z. Zhang, J. Dequidt, J. Back, H. Liu, and C. Duriez
IEEE Robotics and Automation Letters, 2019, Page, Pdf
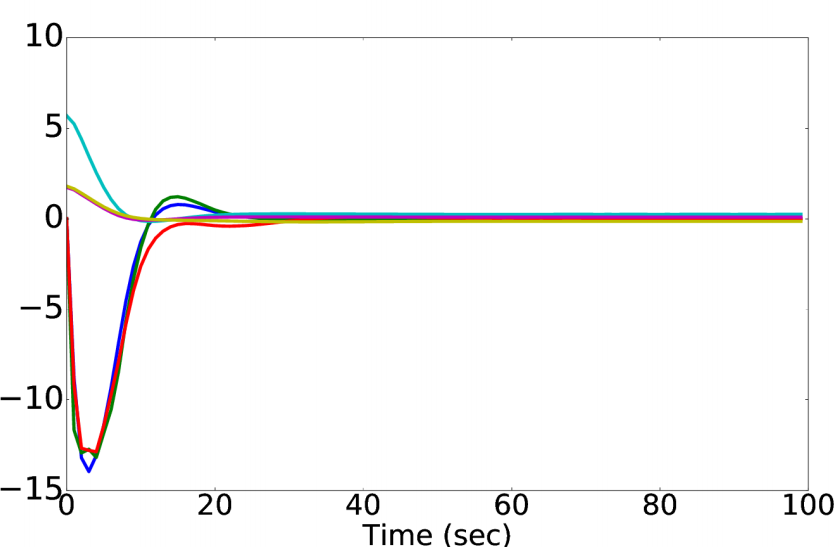
 Dynamically Closed-loop Controlled Soft Robotic Arm using a Reduced Order Finite Element Model with State Observer
Dynamically Closed-loop Controlled Soft Robotic Arm using a Reduced Order Finite Element Model with State Observer
R. K. Katzschmann, M. Thieffry, O. Goury, A. Kruszewski, T.M. Guerra, C. Duriez and D. Rus
to be presented at IEEE RoboSoft 2019
 Finite Element Method-Based Kinematics and Closed-Loop Control of Soft, Continuum Manipulators
Finite Element Method-Based Kinematics and Closed-Loop Control of Soft, Continuum Manipulators
T. Morales Bieze, F. Largilliere, A. Kruszewski, Z. Zhang, R. Merzouki and C. Duriez
Soft Robotics, Mary Ann Liebert, 2018, Page, Pdf
 Reduced order control of soft robots with guaranteed stability
Reduced order control of soft robots with guaranteed stability
M. Thieffry, A.Kruszewski, T.M. Guerra and C.Duriez
European Control Conference (ECC), 2018, Pdf
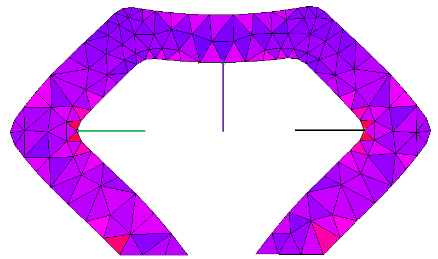
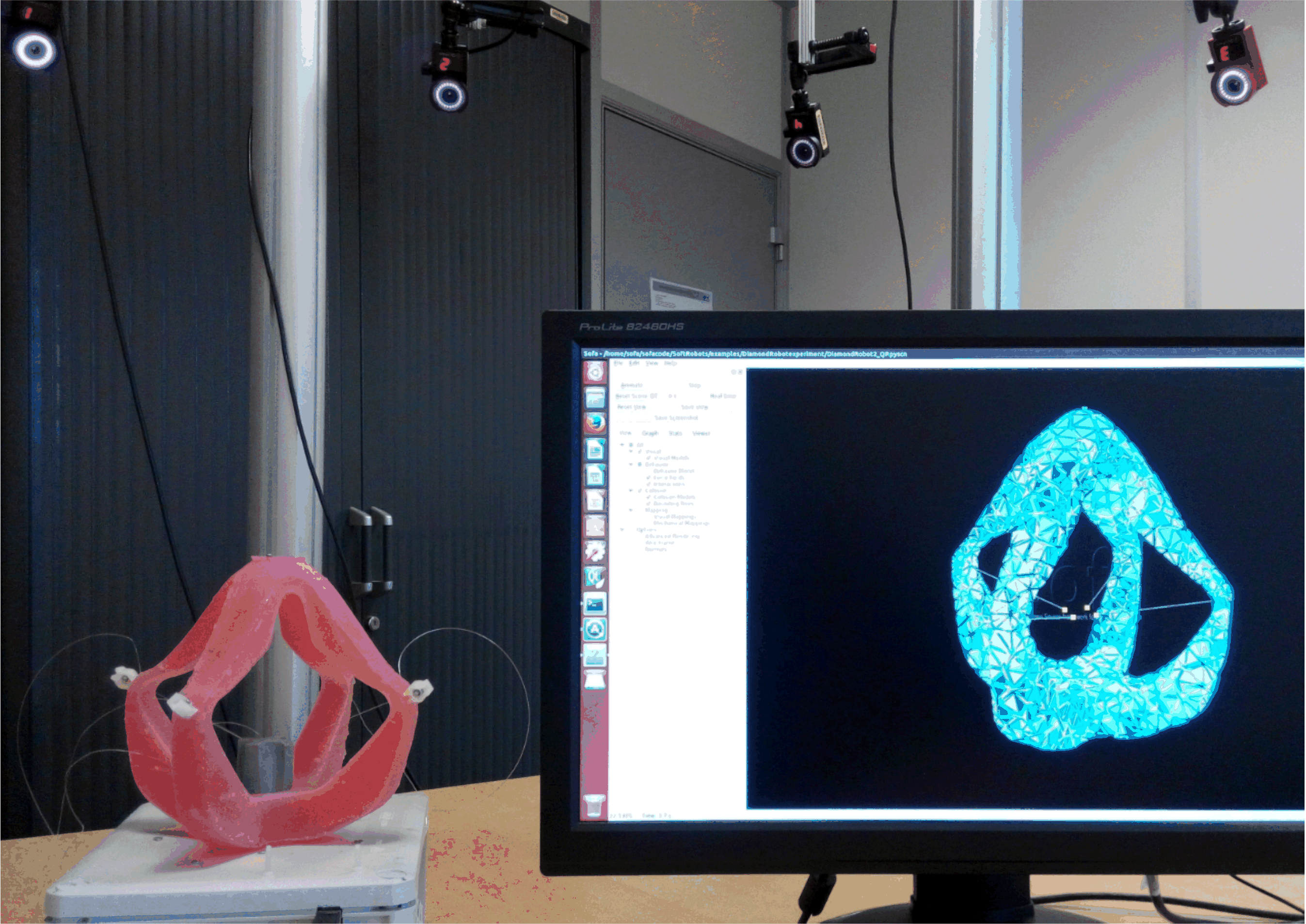 Visual Servoing Control of Soft Robots based on Finite Element Model
Visual Servoing Control of Soft Robots based on Finite Element Model
Z. Zhang, T. Bieze, J. Dequidt, A. Kruszewski, and C. Duriez
International Conference on Intelligent Robots and Systems (IROS), 2017, Page, Pdf
 Dynamic Control of Soft Robots
Dynamic Control of Soft Robots
M. Thieffry, A. Kruszewski, O. Goury, T.M Guerra, and C. Duriez
International Federation of Automatic Control (IFAC) World Congress, 2017, Pdf
 Kinematic Modeling and Observer Based Control of Soft Robot using Real-Time Finite Element Method
Kinematic Modeling and Observer Based Control of Soft Robot using Real-Time Finite Element Method
Z. Zhang, J. Dequidt, A. Kruszewski, F. Largilliere and C. Duriez
IEEE International Conference on Intelligent Robots and Systems (IROS), 2016, Page, Pdf
 Real-time Control of Soft-Robots using Asynchronous Finite Element Modeling.
Real-time Control of Soft-Robots using Asynchronous Finite Element Modeling.
F. Largilliere, V. Verona, E. Coevoet, M. Sanz-Lopez, J. Dequidt and C. Duriez.
IEEE International Conference on Robotics and Automation (ICRA), 2015, Page, Pdf
Control of Elastic Soft Robots based on Real-Time Finite Element Method.
C. Duriez
IEEE International Conference on Robotics and Automation (ICRA), 2013, Page, Pdf, Video