

Soft robots interacting with their environment
Objectives
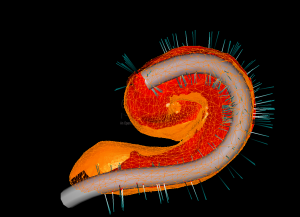
One specificity of soft robots is their ability to be compliant when interacting with their environment. While the control of rigid robots assumes that the robot will operate in a collision-free environment, deformable robots could take advantage of the contacts with their environment to perform a task. For instance, the snake relies on body contact and anisotropic friction in order to move itself on many surfaces. Correct and fast simulation of soft robot interacting with its environment, possibly soft, is a major challenge we are working on. For example, correctly modeling and simulating soft robots interactions is crucial to the development of surgical soft robotics where the robots is interacting with the patients.
Another point is that thanks to its deformable nature, soft robots can also be used as sensors. Indeed, by predicting the robot shape form its actuation, and having feedback on their actual shape, through for example RGBD camera, allows to compute what forces applied of the robot surface best explains the deformation discrepancy.
Related papers & videos
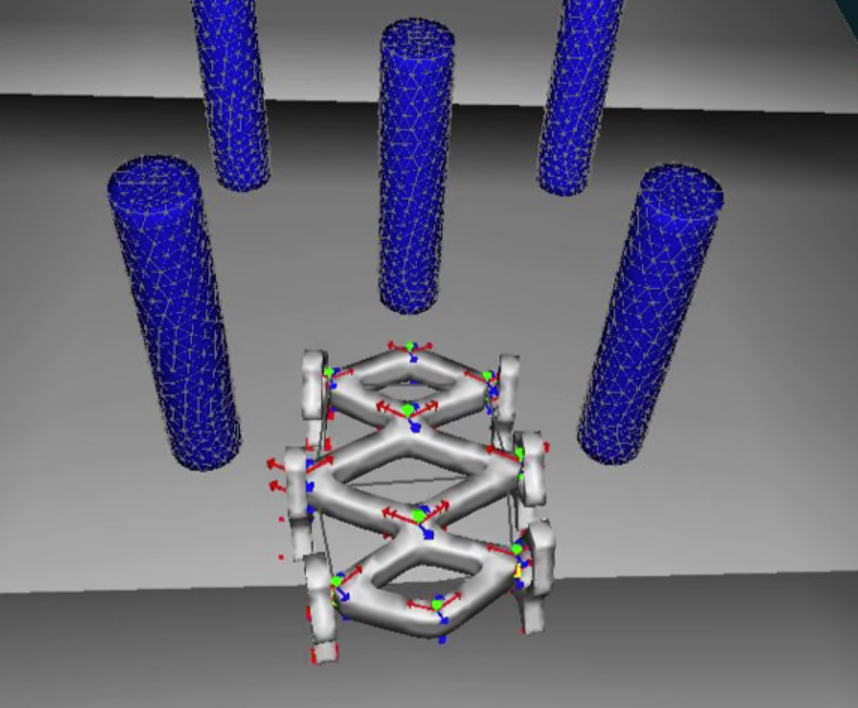
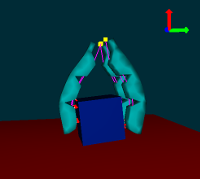
 Soft robots locomotion and manipulation control using FEM simulation and quadratic programming.
Soft robots locomotion and manipulation control using FEM simulation and quadratic programming.
E. Coevoet, A. Escande, C. Duriez
to be presented at IEEE RoboSoft 2019, Page, Pdf, Video
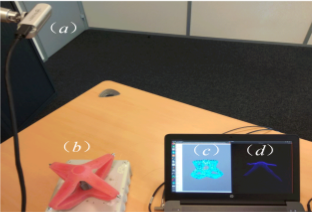 Calibration and External Force Sensing for Soft Robots using an RGB-D Camera
Calibration and External Force Sensing for Soft Robots using an RGB-D Camera
Z. Zhang, A. Petit, J. Dequidt, and C. Duriez
IEEE Robotics and Automation Letters, 2019, Page, Pdf
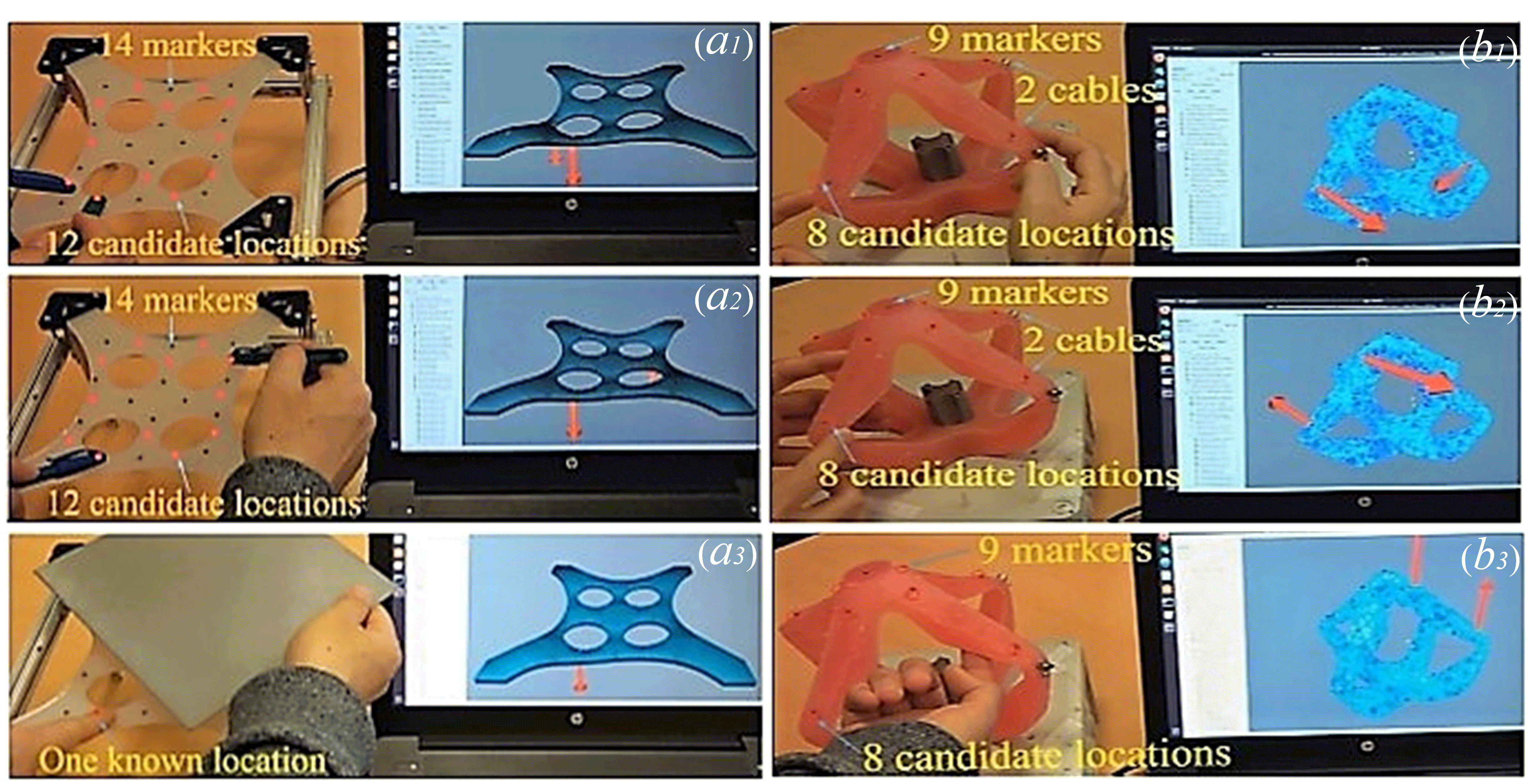 Vision-Based Sensing of External Forces Acting on Soft Robots Using Finite Element Method
Vision-Based Sensing of External Forces Acting on Soft Robots Using Finite Element Method
Z. Zhang, J. Dequidt, and C. Duriez
IEEE Robotics and Automation Letters (RA-Letter), Page, Pdf, Video
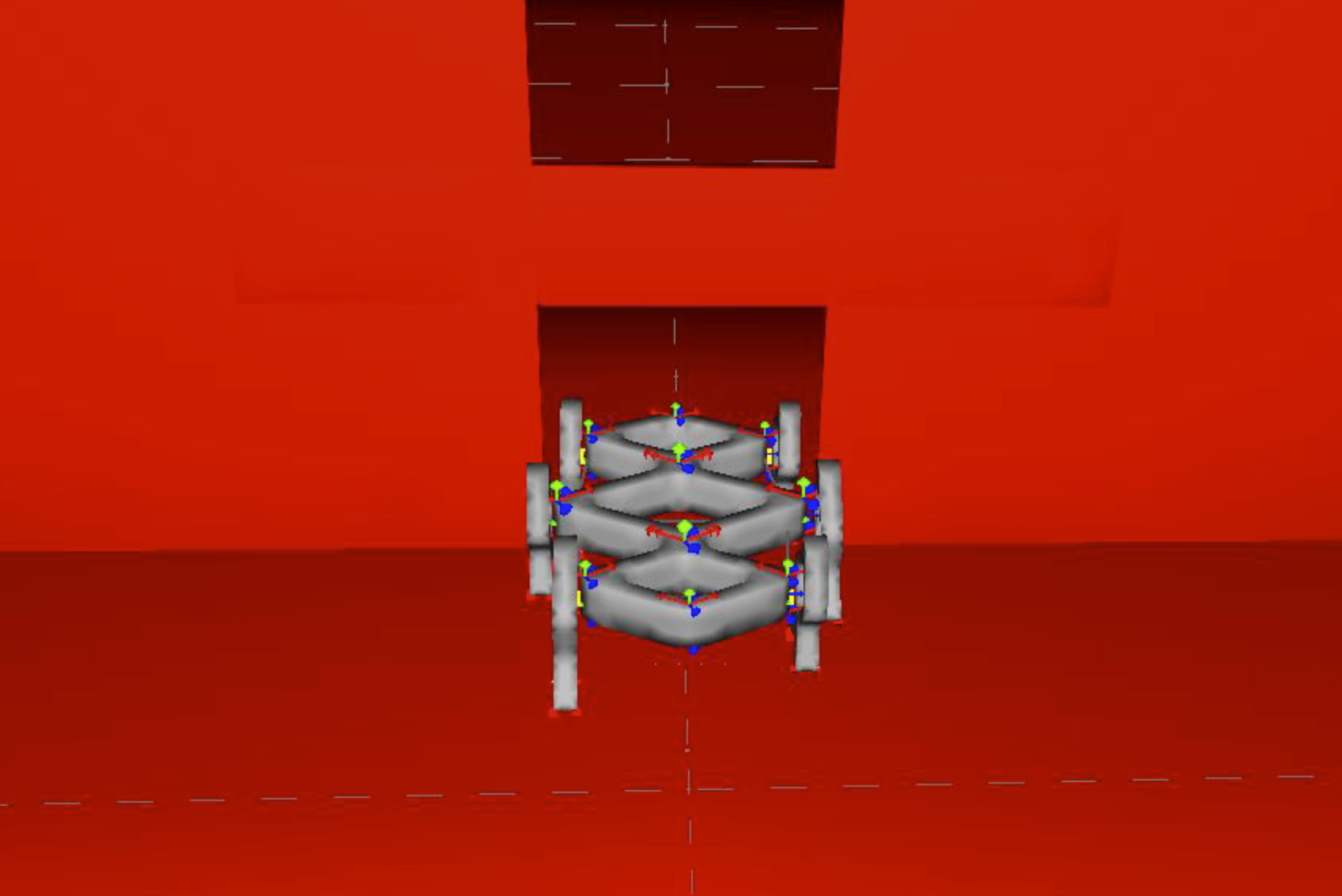
 Optimization-Based Inverse Model of Soft Robots With Contact Handling
Optimization-Based Inverse Model of Soft Robots With Contact Handling
E. Coevoet, A. Escande and C. Duriez
IEEE Robotics and Automation Letters (RA-Letter), 2017, Page, Pdf, Video
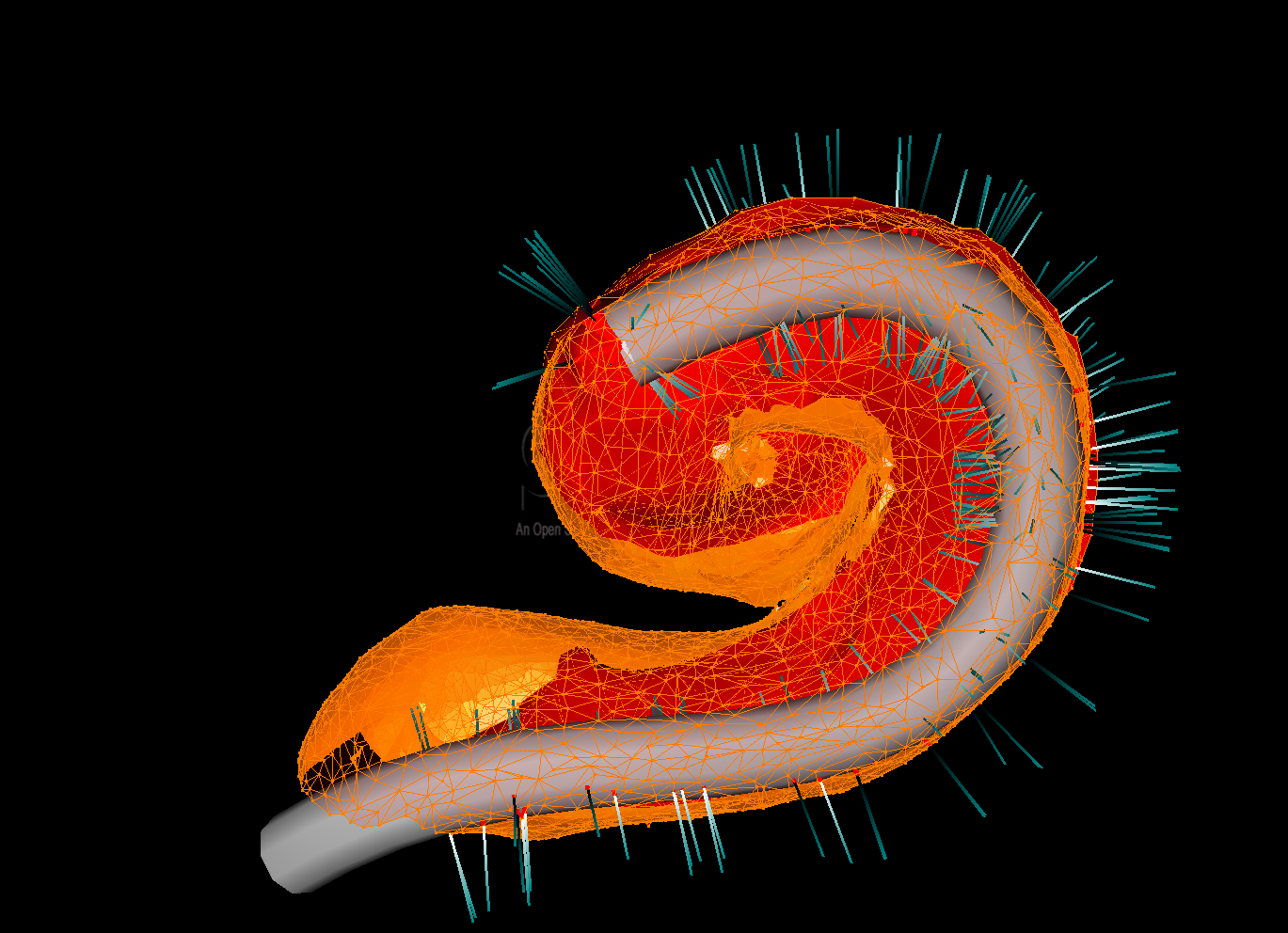
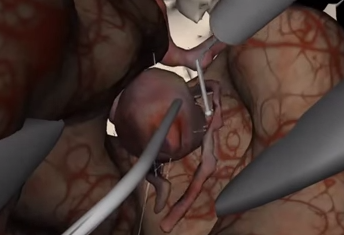
 Numerical Simulation of Cochlear-Implant Surgery: Towards Patient-Specific Planning.
Numerical Simulation of Cochlear-Implant Surgery: Towards Patient-Specific Planning.
O. Goury, Y. Nguyen, R. Torres, J. Dequidt and C. Duriez
19th International Conference on Medical Image Computing and Medical Asserted Intervention (MICCAI), 2016, Page, Pdf, Video