

Selected Publications
(Click here to access all our publications)
2022
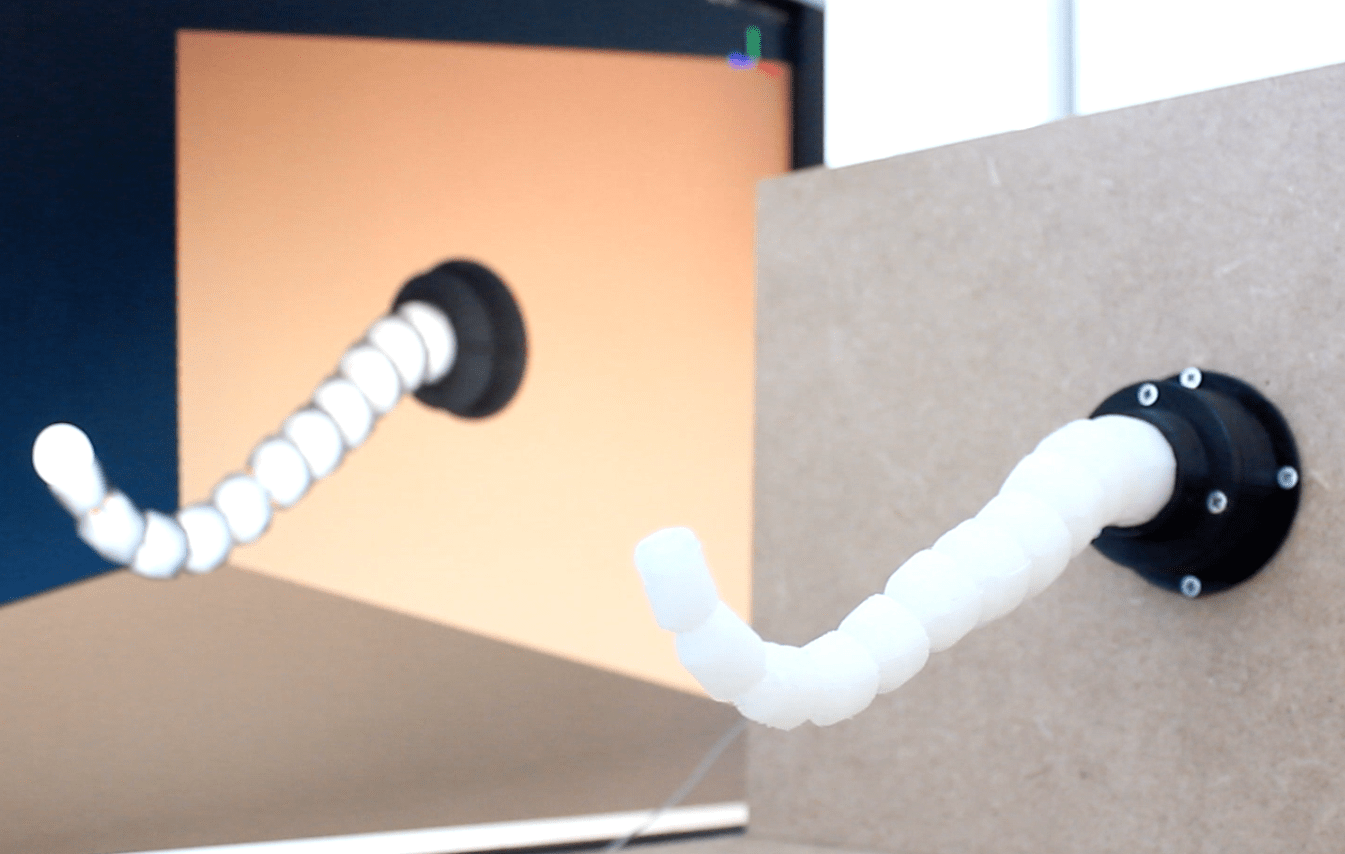
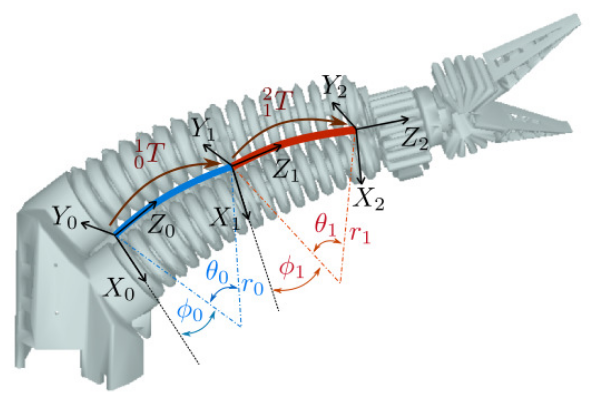
 Model-Based Disturbance Estimation for a Fiber-Reinforced Soft Manipulator using Orientation Sensing
Model-Based Disturbance Estimation for a Fiber-Reinforced Soft Manipulator using Orientation Sensing
B. G. Cangan, S. Escaida Navarro, B. Yang, Y. Zhang, C. Duriez, and R.K. Katzschmann, IEEE/JRS International Conference on Intelligent Robots and Systems 2022 (IROS 2022)
PDF, VIDEO
 Constraint-based simulation of passive suction cups.
Constraint-based simulation of passive suction cups.
A. Bernardin, E. Coevoet, P.G. Kry, S. Andrews, C. Duriez, and M. Marchal – TOG (Proc. SIGGRAPH Asia), 2022,
PDF, VIDEO
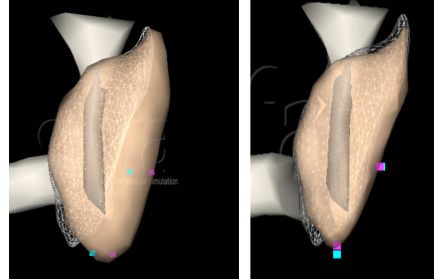
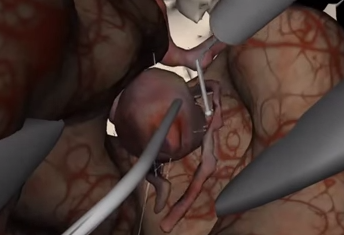
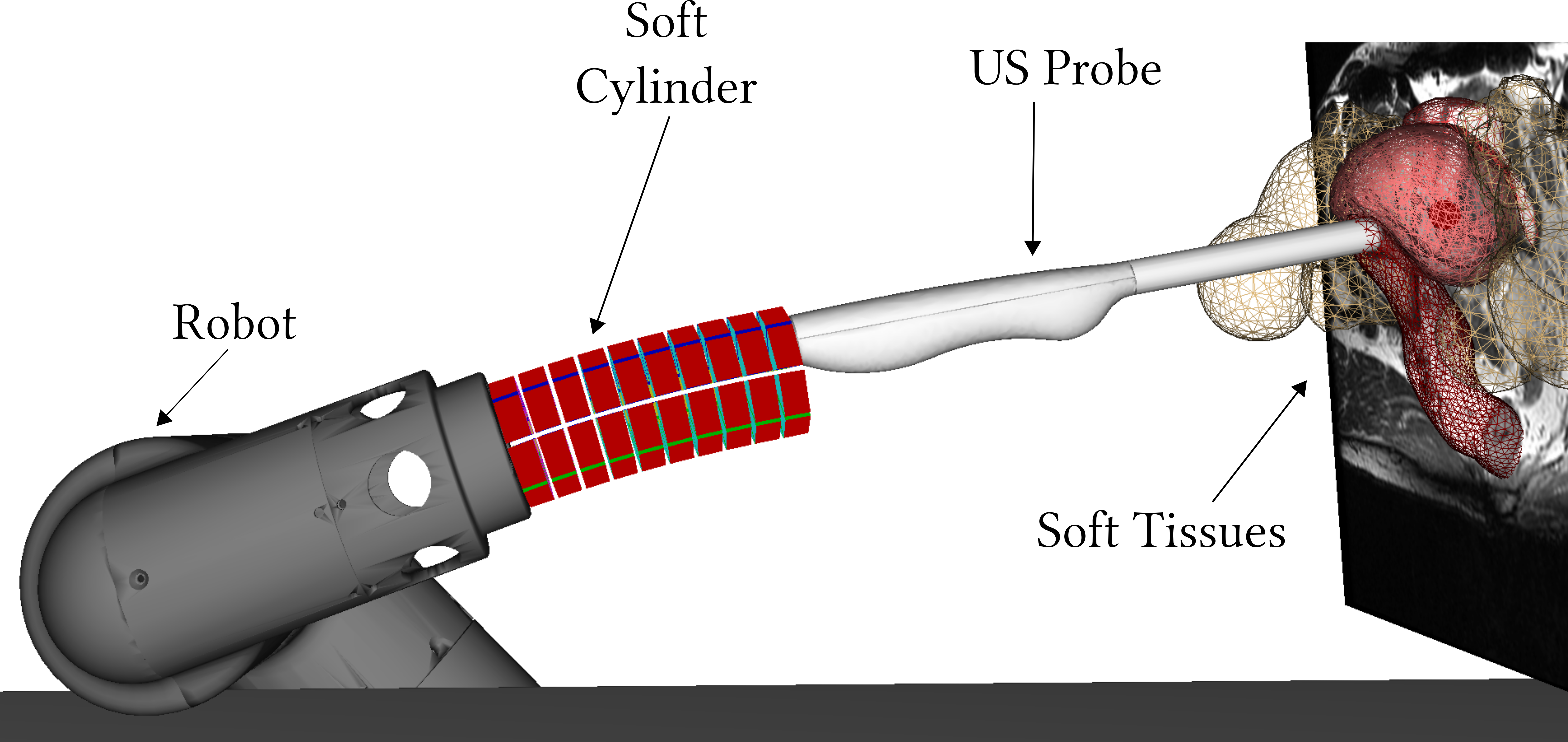 Planning of soft-rigid Hybrid arms in Contact with Compliant Environment: application to the transrectak biopsy of the prostate.
Planning of soft-rigid Hybrid arms in Contact with Compliant Environment: application to the transrectak biopsy of the prostate.
E. Coevoet, Y. Adagolodjo, M. Lin, C. Duriez, and F. Ficuciello – IEEE Robotics and Automation Letters (Proc. RoboSoft), 2022,
PAGE, PDF, VIDEO
2021
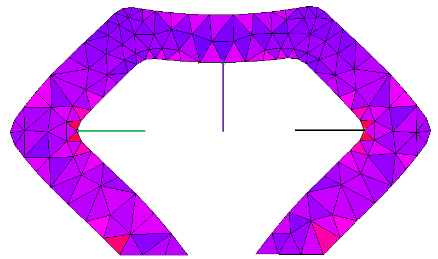
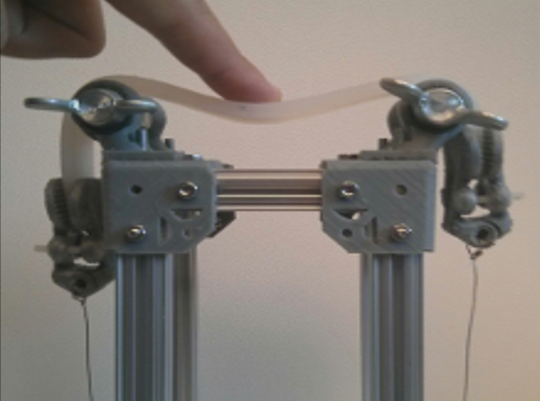
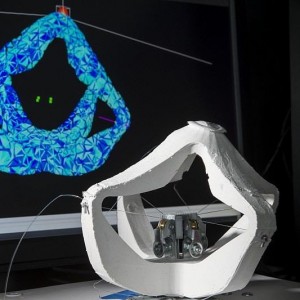
 Enabling the control of a new degree of freedom by using anisotropic material on a 6-DOF parallel soft robot.
Enabling the control of a new degree of freedom by using anisotropic material on a 6-DOF parallel soft robot.
F. Vanneste, O. Goury and C. Duriez – IEEE RoboSoft 2021,
PAGE, PDF, VIDEO
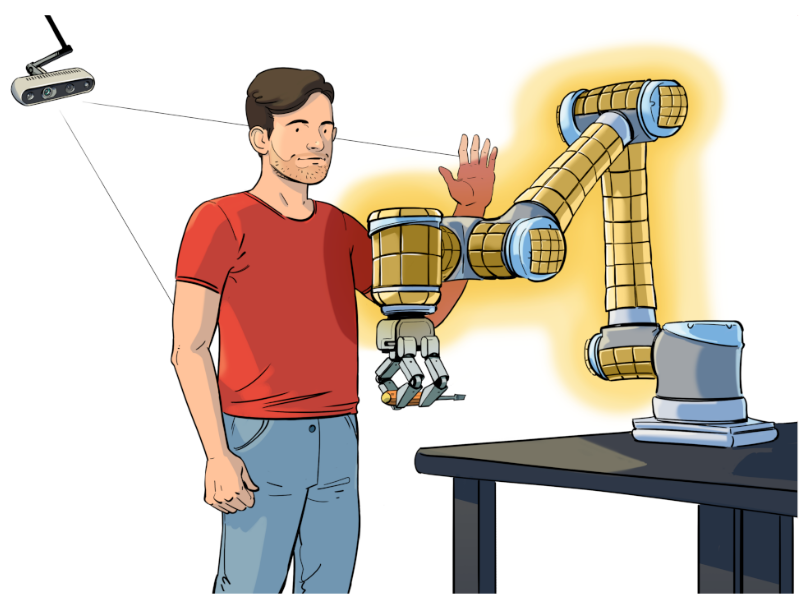 Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications
Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications
S. Escaida Navarro, S. Mühlbacher-Karrer, H. Alagi, H. Zangl, K. Koyama, B.Hein, C. Duriez and J. R. Smith – IEEE Transactions on Robotics 2021, PDF
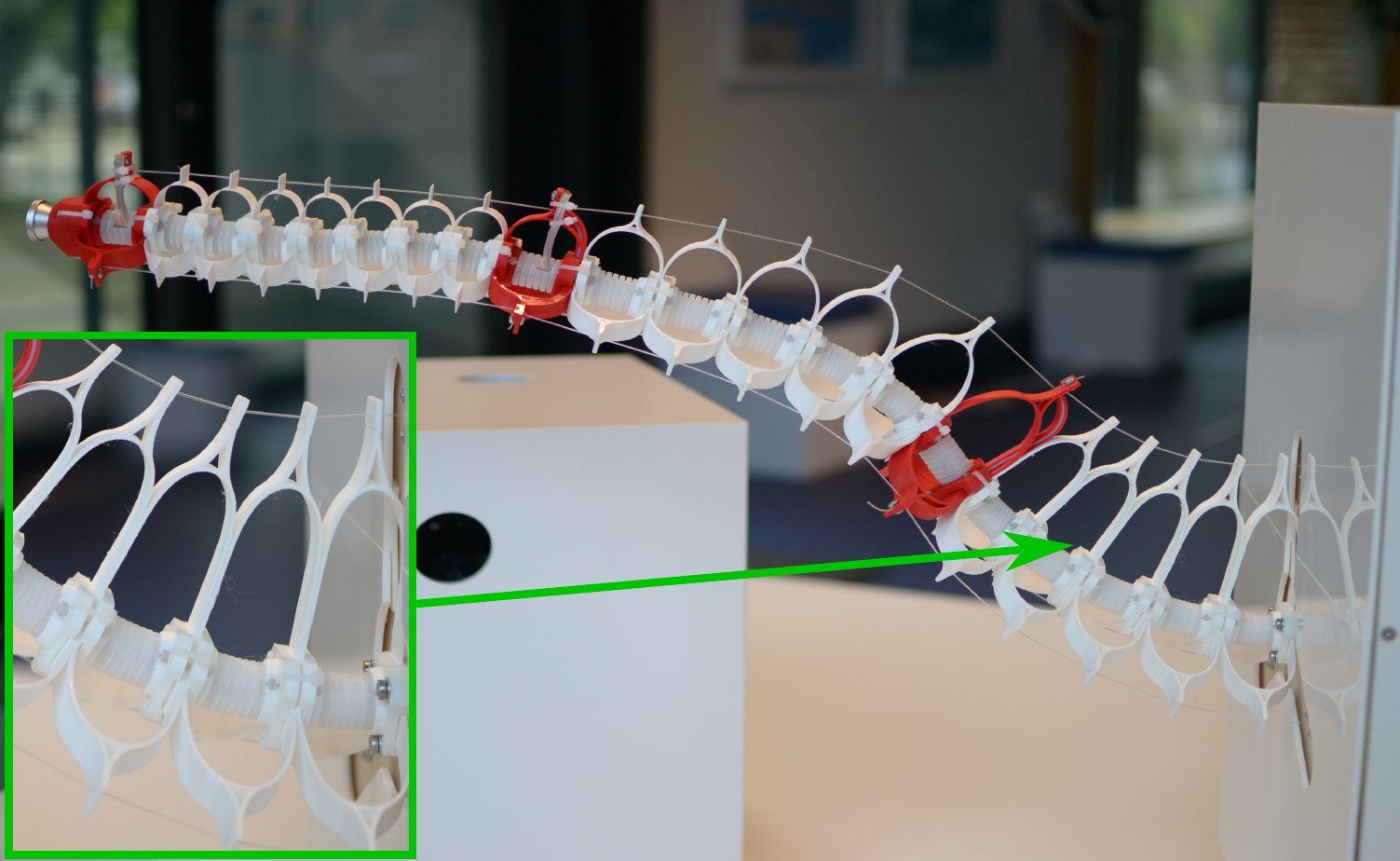
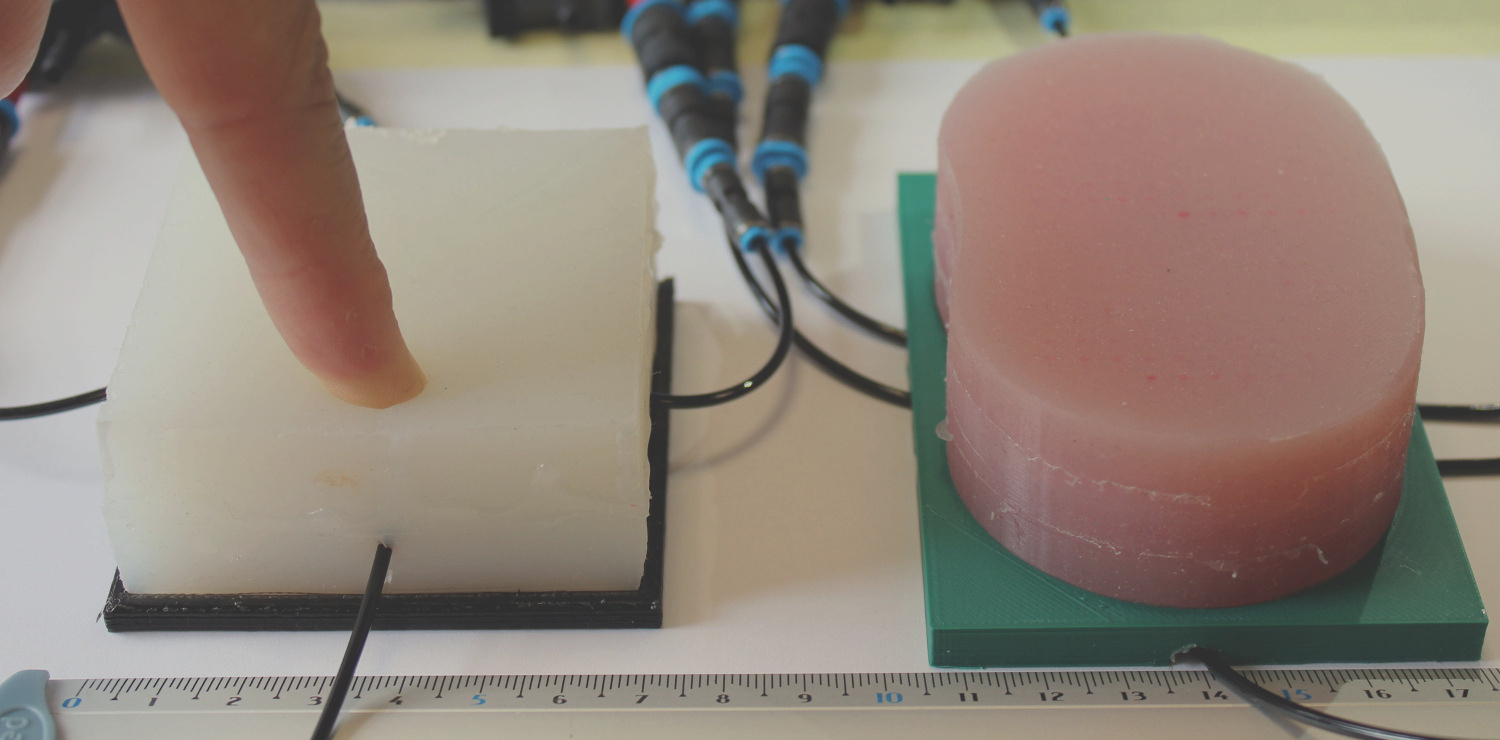
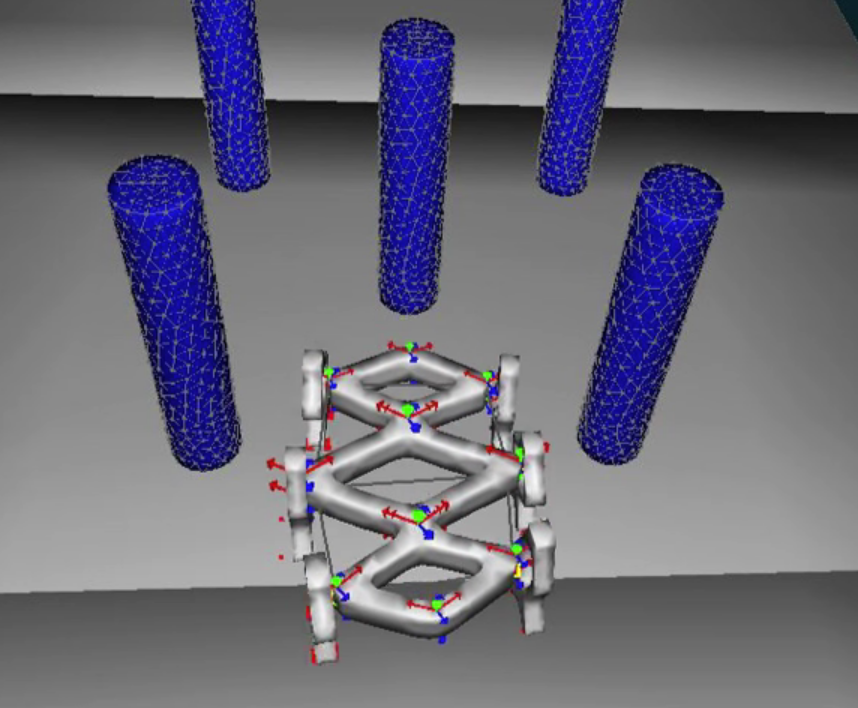
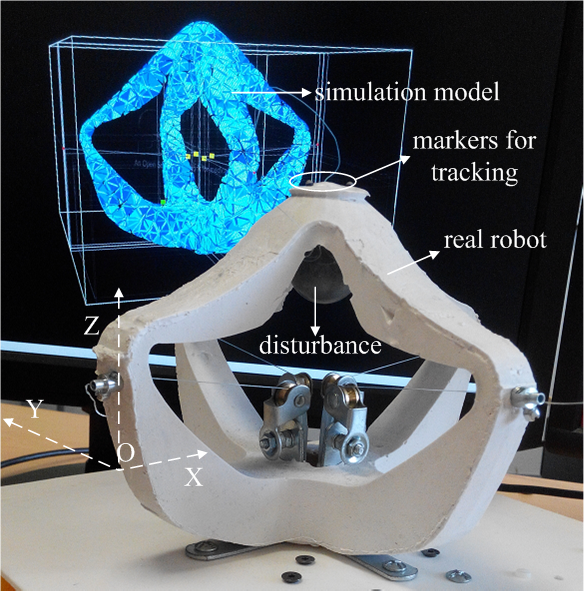
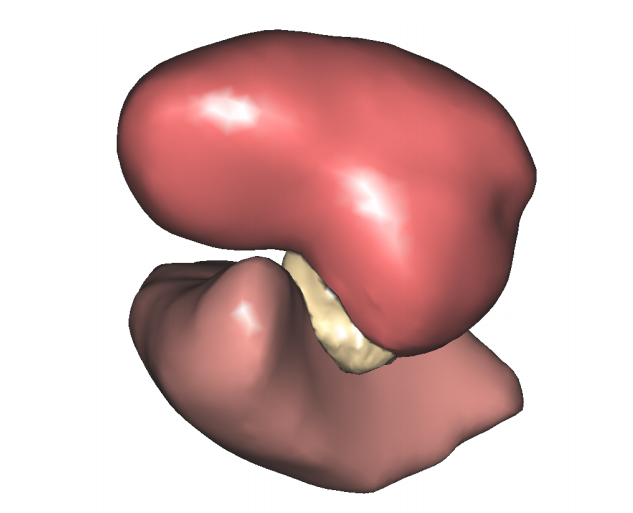
 A Bio-Inspired Active Prostate Phantom for Adaptive Interventions
A Bio-Inspired Active Prostate Phantom for Adaptive Interventions
S. Escaida Navarro, S. Dhaliwal, M. Sanz Lopez, S. Wilby, A. Palmer, W. Polak, R. Merzouki and C. Duriez – IEEE Transactions on Medical Robotics and Bionics 2021, PDF, VIDEO
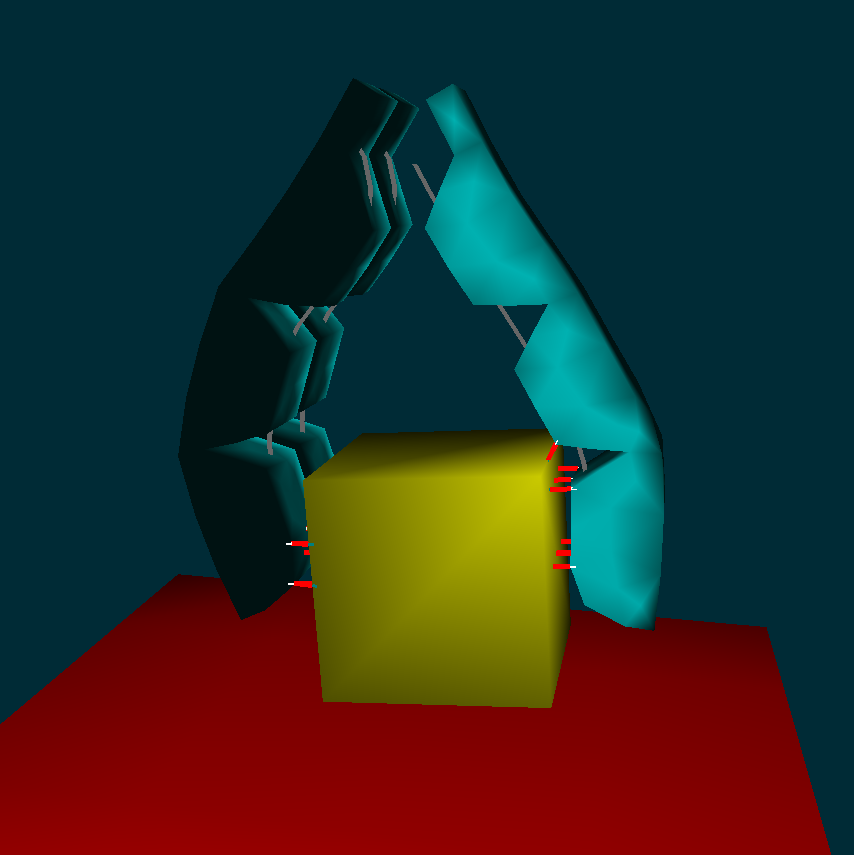
 Real-Time Simulation For Control Of Soft Robots With Self-Collisions Using Model Order Reduction For Contact Forces
Real-Time Simulation For Control Of Soft Robots With Self-Collisions Using Model Order Reduction For Contact Forces
O. Goury, B. Carrez, C. Duriez – IEEE Robotics and Automation Letters 2021,
PAGE, PDF, VIDEO
 Coupling numerical deformable models in global and reduced coordinates for the simulation of the direct
Coupling numerical deformable models in global and reduced coordinates for the simulation of the direct
and the inverse kinematics of Soft Robots
Y. Adagolodjo, F. Renda and C. Duriez – IEEE Robotics and Automation Letters 2021,
PAGE, PDF, VIDEO
2020
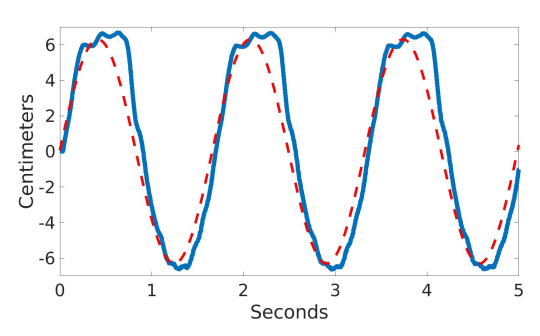
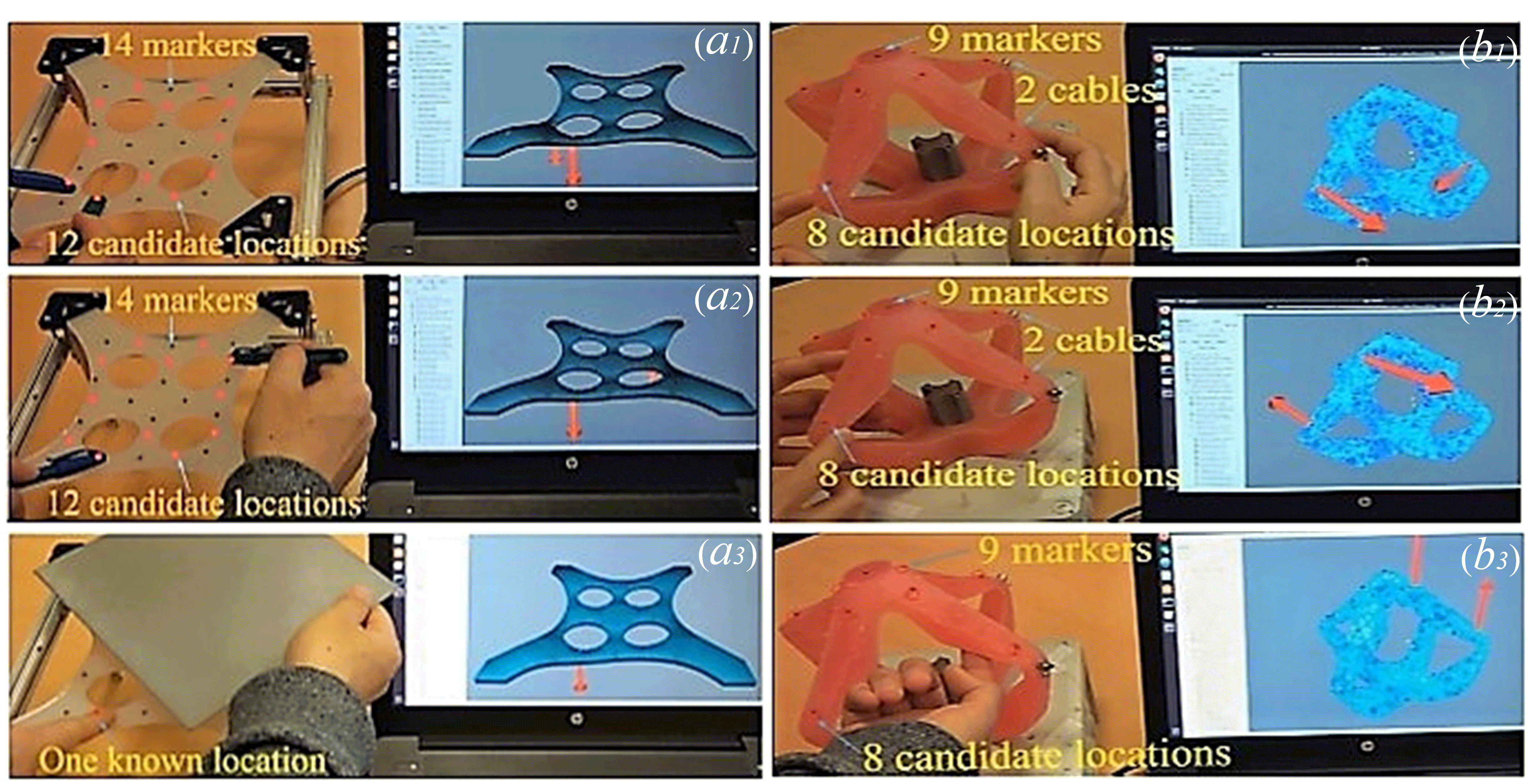
 A Model-based Sensor Fusion Approach for Force and Shape Estimation in Soft Robotics
A Model-based Sensor Fusion Approach for Force and Shape Estimation in Soft Robotics
S. Escaida Navarro, S. Nagels, H. Alagi, L.M. Faller, O. Goury, T. Morales Bieze, H. Zangl, B. Hein, R. Ramakers, W. Deferme, G. Zheng and C. Duriez – IEEE Robotics and Automation Letters 2020,
PDF, VIDEO
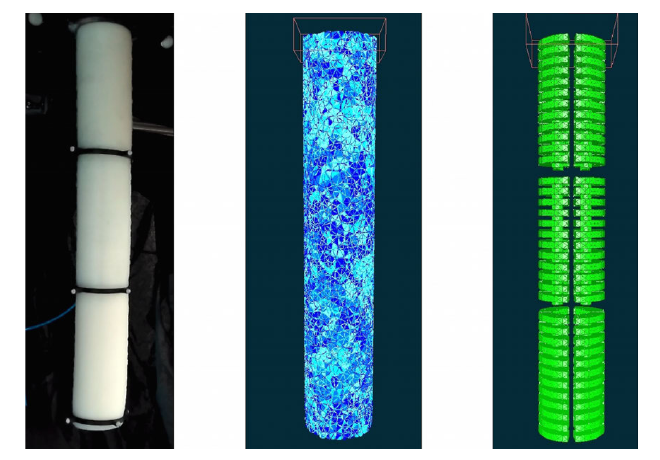
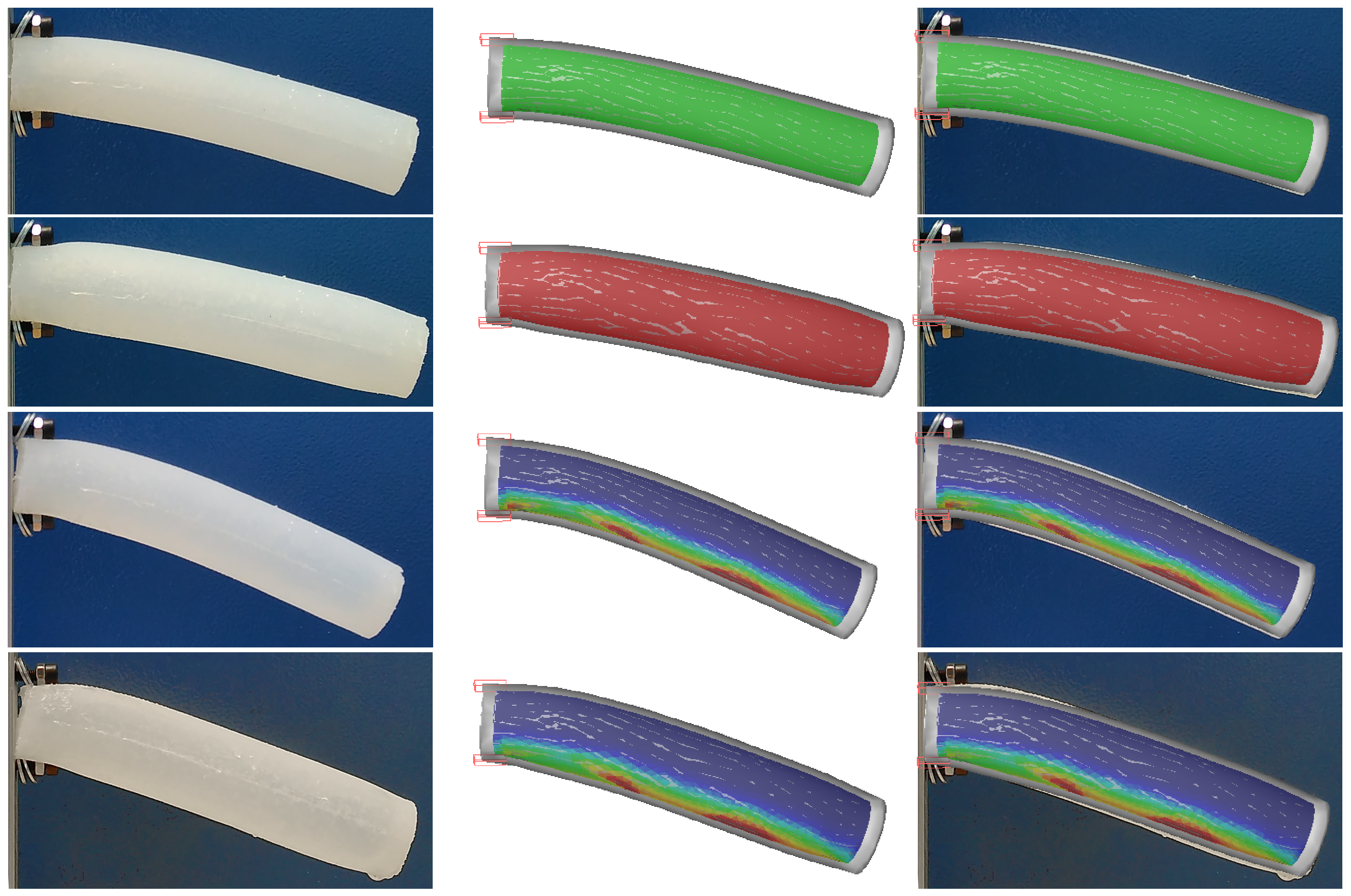
 Anisotropic soft robots based on 3D printed meso-structured materials: design, modeling by homogenization and simulation.
Anisotropic soft robots based on 3D printed meso-structured materials: design, modeling by homogenization and simulation.
F. Vanneste, O. Goury, J. Martinez, S. Lefebvre, H. Delingette and C. Duriez.
IEEE ICRA 2020, PAGE, PDF, VIDEO
2019
 Modeling Novel Soft Mechanosensors based on Air-Flow Measurements
Modeling Novel Soft Mechanosensors based on Air-Flow Measurements
S. Escaida Navarro, O. Goury, Gang Zheng, T. Morales Bieze and C. Duriez – IEEE Robotics and Automation Letters 2019,
PDF, VIDEO
 Control Design for Soft Robots based on Reduced Order Model
Control Design for Soft Robots based on Reduced Order Model
M. Thieffry, A. Kruszewski, C. Duriez and T.M. Guerra – IEEE Robotics and Automation Letters 2019,
PDF
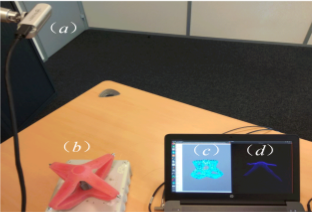 Calibration and External Force Sensing for Soft Robots using an RGB-D Camera
Calibration and External Force Sensing for Soft Robots using an RGB-D Camera
Z. Zhang, A. Petit, J. Dequidt, and C. Duriez – IEEE Robotics and Automation Letters 2019,
PAGE, PDF
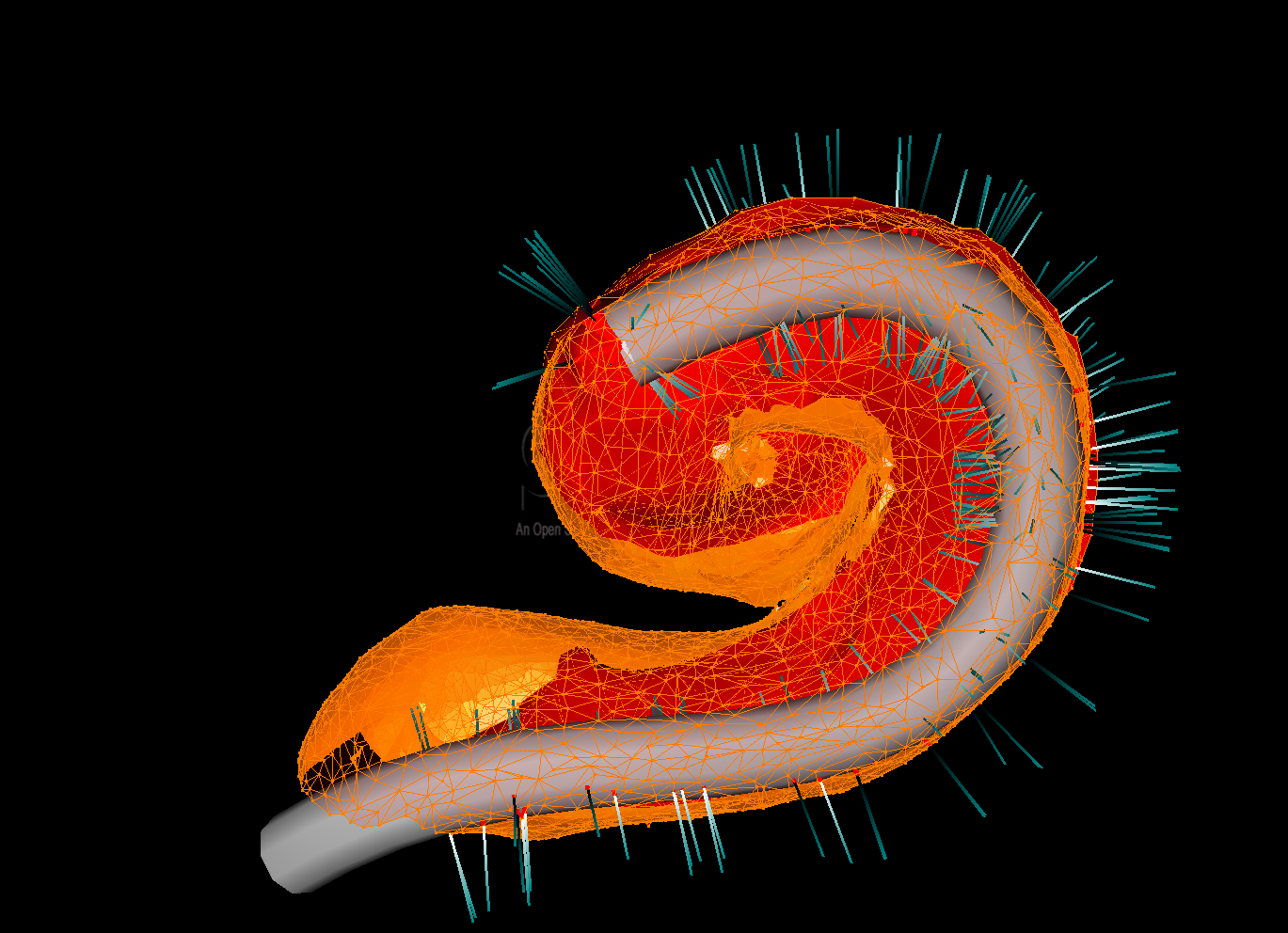
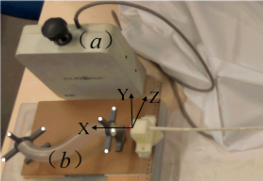 Motion Control of Cable-Driven Continuum Catheter Robot through Contacts
Motion Control of Cable-Driven Continuum Catheter Robot through Contacts
Z. Zhang, J. Dequidt, J. Back, H. Liu, and C. Duriez – IEEE Robotics and Automation Letters 2019,
PAGE, PDF
 Toward Shape Optimization of Soft Robots
Toward Shape Optimization of Soft Robots
T. Morzadec, D. Marchal, C. Duriez – IEEE RoboSoft 2019,
PDF, VIDEO
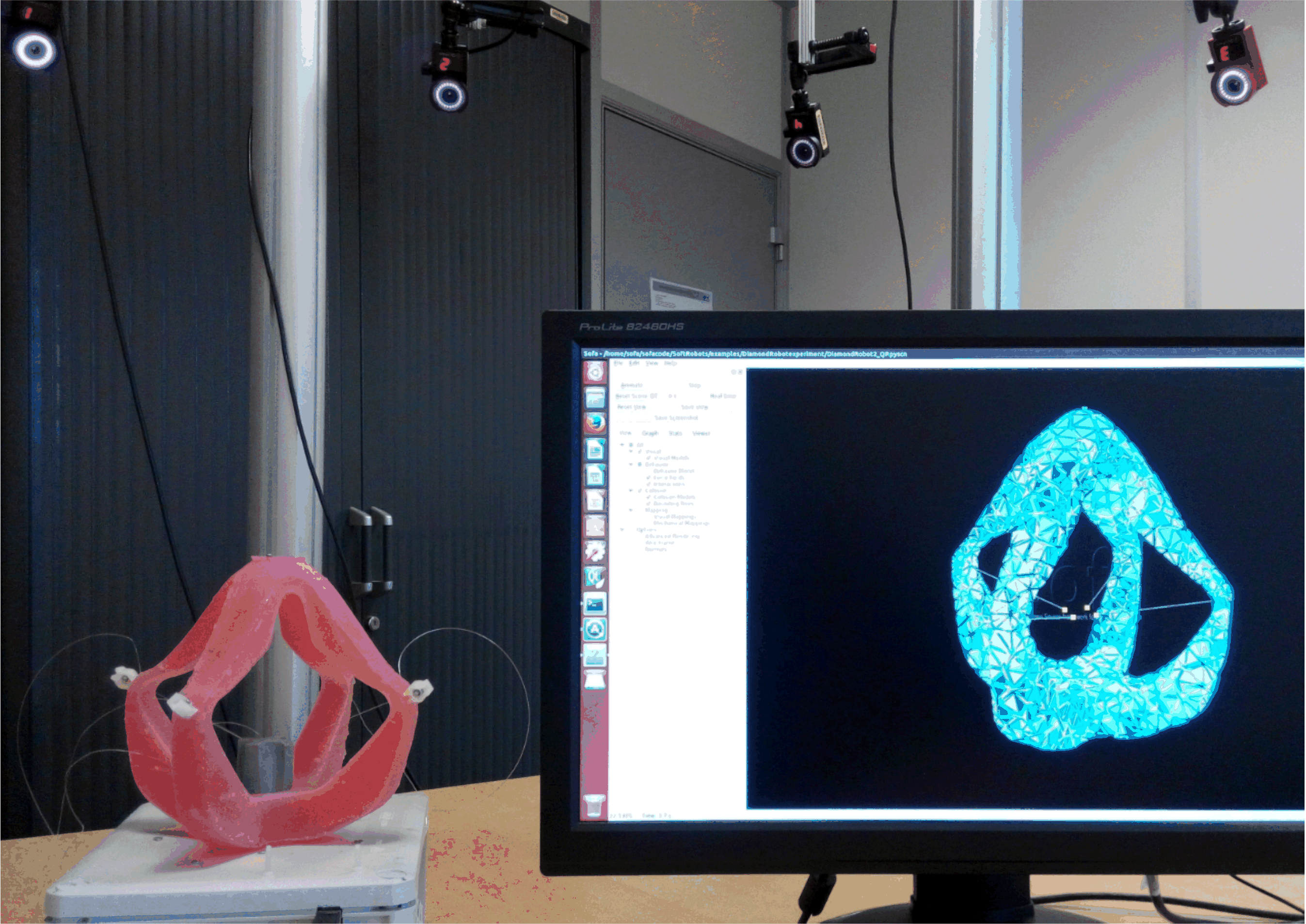
 Soft robots locomotion and manipulation control using FEM simulation and quadratic programming.
Soft robots locomotion and manipulation control using FEM simulation and quadratic programming.
E. Coevoet, A. Escande, C. Duriez – IEEE RoboSoft 2019,
PAGE, PDF, VIDEO
 Dynamically Closed-loop Controlled Soft Robotic Arm using a Reduced Order Finite Element Model with State Observer
Dynamically Closed-loop Controlled Soft Robotic Arm using a Reduced Order Finite Element Model with State Observer
R. K. Katzschmann, M. Thieffry, O. Goury, A. Kruszewski, T.M. Guerra, C. Duriez and D. Rus – IEEE RoboSoft 2019,
PDF
 Vision-based Calibration, Position Control and Force Sensing for Soft Robot
Vision-based Calibration, Position Control and Force Sensing for Soft Robot
Zhongkai Zhang – INRIA & University of Lille, January 10, 2019,
PDF
 Optimization-Based Inverse Model of Soft Robots With Contact Handling
Optimization-Based Inverse Model of Soft Robots With Contact Handling
Eulalie Coevoet – INRIA & University of Lille, January 9, 2019
2018
 Vision-Based Sensing of External Forces Acting on Soft Robots Using Finite Element Method
Vision-Based Sensing of External Forces Acting on Soft Robots Using Finite Element Method
Z. Zhang, J. Dequidt, and C. Duriez – IEEE Robotics and Automation Letters (RA-Letter),
PAGE, PDF, VIDEO
 Finite Element Method-Based Kinematics and Closed-Loop Control of Soft, Continuum Manipulators
Finite Element Method-Based Kinematics and Closed-Loop Control of Soft, Continuum Manipulators
T. Morales Bieze, F. Largilliere, A. Kruszewski, Z. Zhang, R. Merzouki and C. Duriez – Soft Robotics, Mary Ann Liebert, 2018,
PAGE, PDF
 Fast, generic and reliable control and simulation of soft robots using model order reduction
Fast, generic and reliable control and simulation of soft robots using model order reduction
O. Goury and C. Duriez – IEEE Transaction on Robotics, 2018,
PAGE, PDF
 Reduced order control of soft robots with guaranteed stability
Reduced order control of soft robots with guaranteed stability
M. Thieffry, A.Kruszewski, T.M. Guerra and C.Duriez – European Control Conference (ECC), 2018,
PDF
2017
 Software toolkit for modeling, simulation and control of soft robots.
Software toolkit for modeling, simulation and control of soft robots.
E. Coevoet, T. Morales-Bieze, F. Largilliere, Z. Zhang, M. Thieffry, M. Sanz-Lopez, B. Carrez, D. Marchal, O. Goury, J. Dequidt, C. Duriez – Advanced Robotics 2017, PAGE, PDF
 Optimization-Based Inverse Model of Soft Robots With Contact Handling
Optimization-Based Inverse Model of Soft Robots With Contact Handling
E. Coevoet, A. Escande and C. Duriez – IEEE Robotics and Automation Letters (RA-Letter), 2017,
PAGE, PDF, VIDEO
Visual Servoing Control of Soft Robots based on Finite Element Model
Z. Zhang, T. Bieze, J. Dequidt, A. Kruszewski, and C. Duriez – International Conference on Intelligent Robots and Systems (IROS), 2017,
PAGE, PDF
 Dynamic Control of Soft Robots
Dynamic Control of Soft Robots
M. Thieffry, A. Kruszewski, O. Goury, T.M. Guerra and C. Duriez – International Federation of Automatic Control (IFAC) World Congress, 2017,
PDF
 Real-time simulation of hydraulic components for interactive control of soft robots
Real-time simulation of hydraulic components for interactive control of soft robots
A. Rodríguez, E. Coevoet and C. Duriez – IEEE International Conference on Robotics and Automation (ICRA), 2017,
PDF
2016
 Framework for online simulation of soft robots with optimization-based inverse model.
Framework for online simulation of soft robots with optimization-based inverse model.
C. Duriez, E. Coevoet, F. Largilliere, T. Bieze, Z. Zhang, M. Sanz-Lopez, B. Carrez, D. Marchal, O. Goury, J. Dequidt – IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), 2016, PAGE, PDF, VIDEO
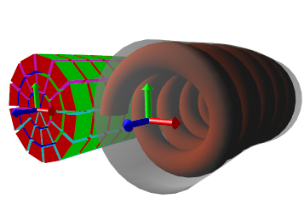
 Numerical Simulation of Cochlear-Implant Surgery: Towards Patient-Specific Planning.
Numerical Simulation of Cochlear-Implant Surgery: Towards Patient-Specific Planning.
O. Goury, Y. Nguyen, R. Torres, J. Dequidt and C. Duriez – 19th International Conference on Medical Image Computing and Medical Asserted Intervention (MICCAI), 2016, PAGE, PDF, VIDEO
 Stiffness rendering on soft tangible devices controlled through inverse FEM simulation.
Stiffness rendering on soft tangible devices controlled through inverse FEM simulation.
F. Largillière, E. Coevoet, M. Sanz-Lopez, L. Grisoni and C. Duriez – International Conference on Intelligent Robots and Systems (IROS), 2016, PDF
 Kinematic Modeling and Observer Based Control of Soft Robot using Real-Time Finite Element Method
Kinematic Modeling and Observer Based Control of Soft Robot using Real-Time Finite Element Method
Z. Zhang, J. Dequidt, A. Kruszewski, F. Largilliere and C. Duriez – International Conference on Intelligent Robots and Systems (IROS) 2016, PAGE, PDF
2015
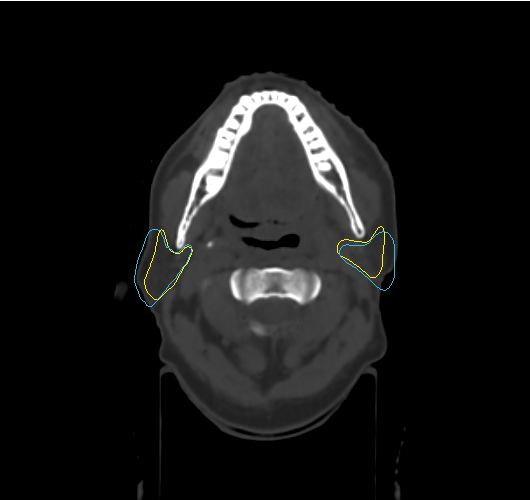
 Registration by interactive inverse simulation: application for adaptive radiotherapy.
Registration by interactive inverse simulation: application for adaptive radiotherapy.
E. Coevoet, N. Reynaert, E. Lartigau, L. Schiappacasse, J. Dequidt and C. Duriez – International Journal of Computer Assisted Radiology and Surgery (IJCARS) 2015, PAGE, PDF
 Domain decomposition approach for FEM quasistatic modeling and control of Continuum Robots with rigid vertebras.
Domain decomposition approach for FEM quasistatic modeling and control of Continuum Robots with rigid vertebras.
J. Bosman, T. Morales Bieze, O. Lakhal, M. Sanz-Lopez, R. Merzouki, C. Duriez – IEEE International Conference on Robotics and Automation (ICRA) 2015, PAGE, PDF, VIDEO
 Real-time Control of Soft-Robots using Asynchronous Finite Element Modeling
Real-time Control of Soft-Robots using Asynchronous Finite Element Modeling
F. Largilliere, V. Verona, E. Coevoet, M. Sanz-Lopez, J. Dequidt and C. Duriez – IEEE International Conference on Robotics and Automation (ICRA) 2015,
PAGE, PDF
 Vascular neurosurgery simulation with bimanual haptic feedback.
Vascular neurosurgery simulation with bimanual haptic feedback.
J. Dequidt, E. Coevoet, L. Thines and C. Duriez – 12th Workshop on Virtual Reality Interaction and Physical Simulation (VRIPHYS) 2015, PAGE, PDF, VIDEO
 Physically-based 6-DoF Nodes Deformable Models: Application to Connective Tissues Simulation and Soft-Robots Control.
Physically-based 6-DoF Nodes Deformable Models: Application to Connective Tissues Simulation and Soft-Robots Control.
Julien Bosman – Modeling and Simulation. Université Lille 1 2015
PAGE, PDF
2014
 Introducing interactive inverse FEM simulation and its application for adaptive radiotherapy.
Introducing interactive inverse FEM simulation and its application for adaptive radiotherapy.
E. Coevoet, N. Reynaert, E. Lartigau, L. Schiappacasse, J. Dequidt and C. Duriez – 17th International Conference on Medical Image Computing and Medical Asserted Intervention (MICCAI) 2014,
PAGE, PDF, VIDEO
 Real-time FEM based control of soft surgical robots.
Real-time FEM based control of soft surgical robots.
F Largillière, E Coevoet, L Grisoni, C Duriez – SURGETICA 2014,
PAGE, PDF
2013
 Control of Elastic Soft Robots based on Real-Time Finite Element Method.
Control of Elastic Soft Robots based on Real-Time Finite Element Method.
C. Duriez – IEEE International Conference on Robotics and Automation (ICRA), 2013,
PAGE, PDF, VIDEO