
Variational Inference and Learning of Piecewise-linear Dynamical Systems
Xavier Alameda-Pineda, Vincent Drouard, and Radu Horaud
Submitted to IEEE Transactions on Neural Networks and Learning Systems (arXiv) 
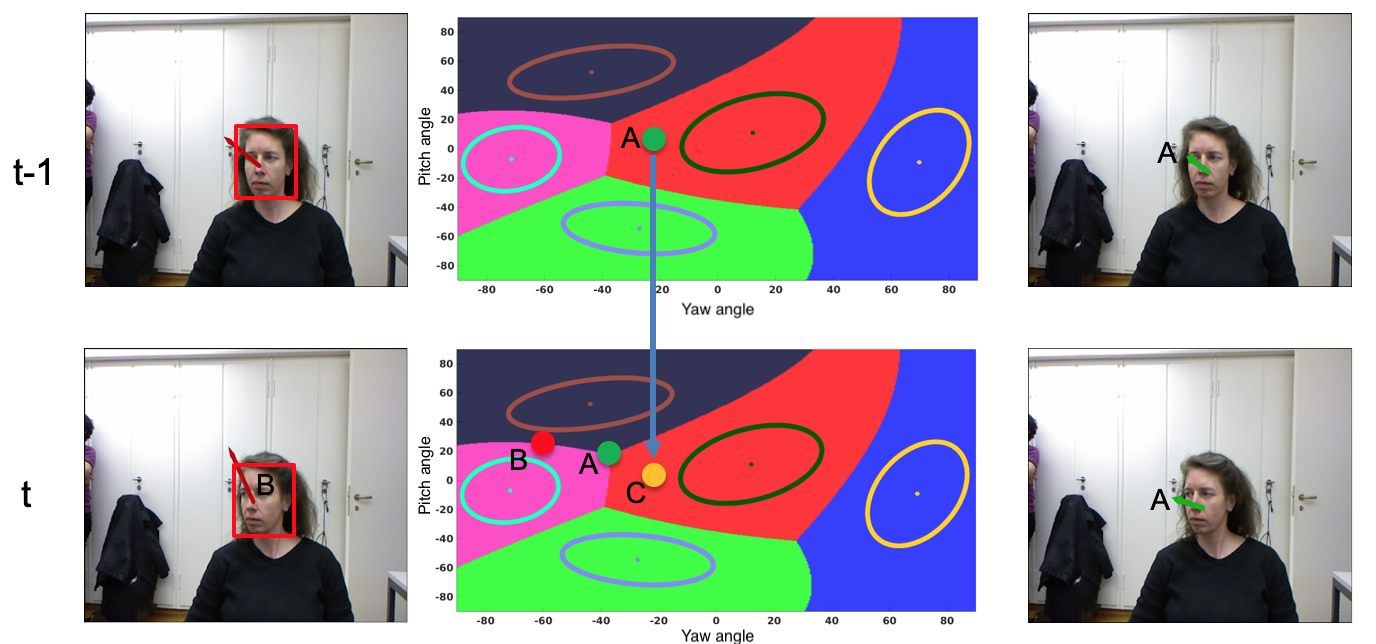
The proposed variational piecewise-linear dynamical system algorithm applied to the problem of head pose tracking (HPT). The central column shows the Gaussian mixture that models the latent space. The parameters of this mixture don’t vary over time and they are learnt from a training set of input-output instances of the observed and latent variables. In this example, we show the likelihood function associated with the latent variables of head pose, namely the yaw and pitch angles. The observed pose at t (red dot denoted B) is estimated from a high-dimensional feature vector that describes a face (left column). The variational means (green dots denoted A and shown with green arrows onto the right column) are inferred by the E-X step of the algorithm, based on the current dynamic prediction (orange dot denoted C) and the current observation (red dot denoted B).
Abstract. Modeling the temporal behavior of data is of primordial importance in many scientific and engineering fields. Baseline methods assume that both the dynamic and observation equations follow linear-Gaussian models. However, there are many real-world processes that cannot be characterized by a single linear behavior. Alternatively, it is possible to consider a piecewise-linear model which, combined with a switching mechanism, is well suited when several modes of behavior are needed. Nevertheless, switching dynamical systems are intractable because their computational complexity increases exponentially with time. In this paper, we propose a variational approximation of piecewise linear dynamical systems. We provide full details of the derivation of two variational expectation-maximization algorithms, a filter and a smoother. We show that the model parameters can be split into two sets, static and dynamic parameters, and that the former parameters can be estimated off-line together with the number of linear modes, or the number of states of the switching variable. We apply the proposed method to a visual tracking problem, namely head-pose tracking, and we thoroughly compare our algorithms with several state of the art trackers.