
Abstract (PAMI version)
| This paper addresses the problem of registering multiple point sets. Solutions to this problem are often approximated by repeatedly solving for pairwise registration, which results in an uneven treatment of the sets forming a pair: a model set and a data set. The main drawback of this strategy is that the model set may contain noise and outliers, which negatively affects the estimation of the registration parameters. In contrast, the proposed formulation treats all the point sets on an equal footing. Indeed, all the points are drawn from a central Gaussian mixture, hence the registration is cast into a clustering problem. We formally derive batch and incremental EM algorithms that robustly estimate both the GMM parameters and the rotations and translations that optimally align the sets. Moreover, the mixture’s means play the role of the registered set of points while the variances provide rich information about the contribution of each component to the alignment. We thoroughly test the proposed algorithms on simulated data and on challenging real data collected with range sensors. We compare them with several state-of-the-art algorithms, and we show their potential for surface reconstruction from depth data. | 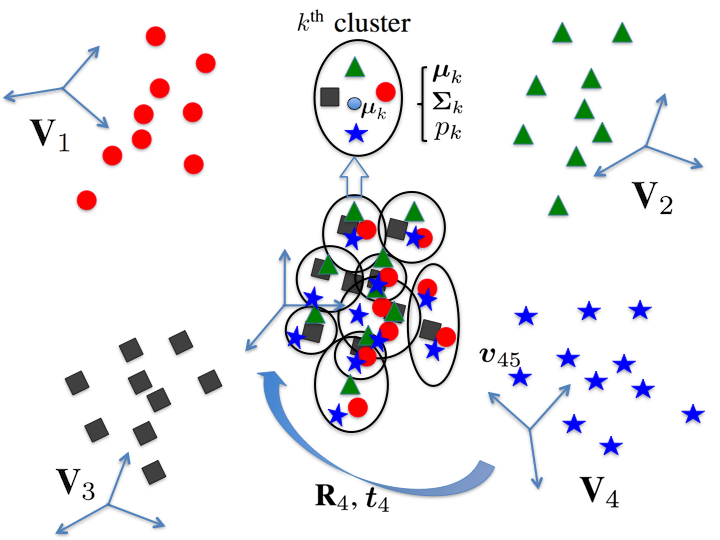 |
Publication
 Download PDF |
 Download Poster |
A generative model for the joint registration of multiple point sets Bibtex: @inproceedings{Evangelidis-ECCV-2014, author = {Evangelidis, G.D. and Kounades-Bastian, D. and Horaud, R. and Psarakis E.Z.}, title = {A generative model for the joint registration of multiple point sets}, booktitle = {European Conference on Computer Vision (ECCV)}, year = {2014}, } |

|
Joint Alignment of Point Sets with Batch and IncrementalExpectation-Maximization G.D. Evangelidis, R. Horaud IEEE Transactions on Pattern Analysis & Machine Intelligence, 2018 Bibtex: @inproceedings{EvangelidisHoraudPAMI2018, author = {Evangelidis, G.D. and and Horaud, R.}, title = {Joint Alignment of Point Sets with Batch and IncrementalExpectation-Maximization}, booktitle = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, year = {2018}, } |
Code & Data-set
We provide a Matlab code that implements the JRMPC algorithm (Joint Registration of Multiple Point Clouds) as presented in the above paper. We also provide a data-set, referred to as EXBI data-set, of 10 real point-sets captured when moving a TOF camera around a static scene (see the figure below). While an RGB value is assigned to each point owing to a rigidly attached color camera (hence the inaccuracies near discontinuities), the color information is used for visualizations purposes only. Please see the README file and the Matlab demos.
 |
| EXBI data-set |
Download Code (ver 0.9.4) and Data-set
(last software update: May 12th, 2015)
last update: May 24th, 2014 (a bug in variance initialization has been fixed, README file is updated)
Videos
| Evolution of GMM means when running JRMPC algorithm | Registration of EXBI dataset (10 point sets) with several algorithms (see the paper) |
If you cannot see the videos, visit the following youtube links: [Video1] [Video2]