

IEEE INTERNATIONAL CONFERENCE ON SOFT ROBOTICS
APRIL 6, 2020
Yale University, USA
Tutorial :Modeling, simulation and control
of deformable robots on SOFA framework.
Organizers
-
-
- Christian Duriez, Research Director, Inria Lille
- Damien Marchal, Senior Research Engineer, CNRS
- Hugo Talbot, SOFA Consortium
- Olivier Goury, Research Scientist, Inria Lille
- Felix Vanneste, PhD Student, Inria Lille
- Walid Amehri, PhD Student, Inria Lille
Description

Soft Tripod Robot
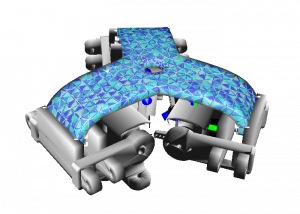
Soft Tripod Robot Simulation
This workshop will provide a series of in-depth tutorial on how to use the open source simulation framework SOFA and the SoftRobots plugins to model, simulate and control deformable robots. At the end of the day we expect attendees to be capable of modeling and controlling basic soft robots with SOFA including precise contact modeling and inverse control. For that, throughout the day we will alternate between the theoretical aspects of the SOFA modeling and very practical sessions. During these practical sessions the attendees will have the opportunity to practice on the “Soft Tripod” an open-hardware learning platform available at https://handsonsoftrobotics.lille.inria.fr/.
The last session of the day will focus on providing examples of applications and use-cases from Soft-Robotics community of user.
Tutorial requirements
Binary version of SOFA packaged with our plugins are available (thanks to the support of the Sofa-consortium) in our download [Page].
Tutorial schedule
Afternoon session 1 : Modeling of a soft robot on SOFA (1h30), D.Marchal & C. Duriez
In the first 45 minutes of the session we will presents the SOFA community and the SOFA concepts: SceneGraph, Object, Node, Data, Mapping and ForceField. Then the attendees will have the opportunity to model a very simple scene. During this session, we will follow a tutorial that presents how to model and simulate a soft tripod robot. The content is available on the website https://handsonsoftrobotics.lille.inria.fr/. This tripod is an open-hardware, cheap and easy to replicate for soft robots designed. It is composed of three servo motors actuating and deforming an elastic deformable part. Attendees will be learn how to model and simulate this robot through the step by step tutorial: deformable mechanical modeling, constraints, coupling rigid and deformable parts and contact modeling.
-
-
-
Afternoon session 2 : Real-time Simulation, inverse model and control (1h30), W. Amehri & C. Duriez
Keywords: Deformable material & FEM, Actuators modeling, Interactive control, Deformable-Rigid coupling, Contact modeling.
The session will continue the first session on the tripod robot, but focussing on connecting the simulation to the hardware, in particular for control. We will then see how to add inverse kinematic simulation of the deformable for open/close loop control.The session will terminate on closing the loop by using ROS to get the real world robot position position from a LeapMotion allowing to close the loop.
3:30 pm to 4:00 pm: Constraint based modeling (presentation)
4:00 pm to 4:30 pm: Contact modeling (practice)
4:30 pm to 5:00 pm: Inverse Kinematic for open-loop control (presentation & practice)
5:00 pm to 5:30 pm: Closed loop control and applications (presentation)
About SOFA
SOFA is based on Finite Element Methods and provide state-of-the-art solution to compute deformations and multi-contact response with friction in real-time.
About DEFROST
In the last years, the presenters have been part of the DEFROST research team (Inria / University of Lille in France). They are developing a platform based on SOFA that gathers algorithms for modeling, simulation and control of soft robots. The team released several plugins for soft robotics, including SoftRobots (https://project.inria.fr/softrobot/), and ModelOrderReduction (https://project.inria.fr/modelorderreduction/). These tools are made either open-source or freely available to the community for research purposes.
-