

Shape design and optimization via Evolutionary Algorithms
Design and optimization of shapes for soft robotics can be hard and counterintuitive, since the behavior of soft materials is complex to foreseen. Therefore, the goal of the project is to create a computer aided designing tool, to ease the creation of optimized shapes.
Moreover, the cost functions which have to be maximized or minimized could be some mechanical behaviors (that are evaluated with SOFA). Consequently, they are not differentiable with respect to the shape, and the usual deterministic gradient descent methods do not apply. So that the assisting tool will be based on evolutionary algorithms, to suggest suitable shapes, corresponding to desired mechanical properties.
An evolutionary algorithm start from an initial population and reaches an advanced body after a few hundreds generations, via crossings and mutations. Our tools will be implemented both with Python, Cython and C++.
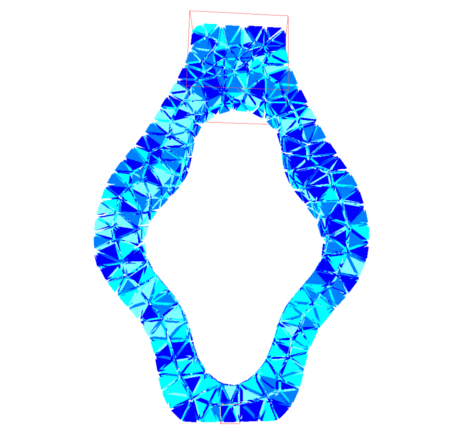
As an example, we are implementing an algorithm to improve an air actuator. We aim at maximizing the vertical stretching and minimizing the horizontal dilatation at the same time.

Related papers & videos
Related papers & videos
 Toward Shape Optimization of Soft Robots
Toward Shape Optimization of Soft Robots
T. Morzadec, D. Marchal, C. Duriez
to be presented at IEEE RoboSoft 2019, Pdf, Video