
-
Contents
Chroma’s UAVs 3D Mapping simulator
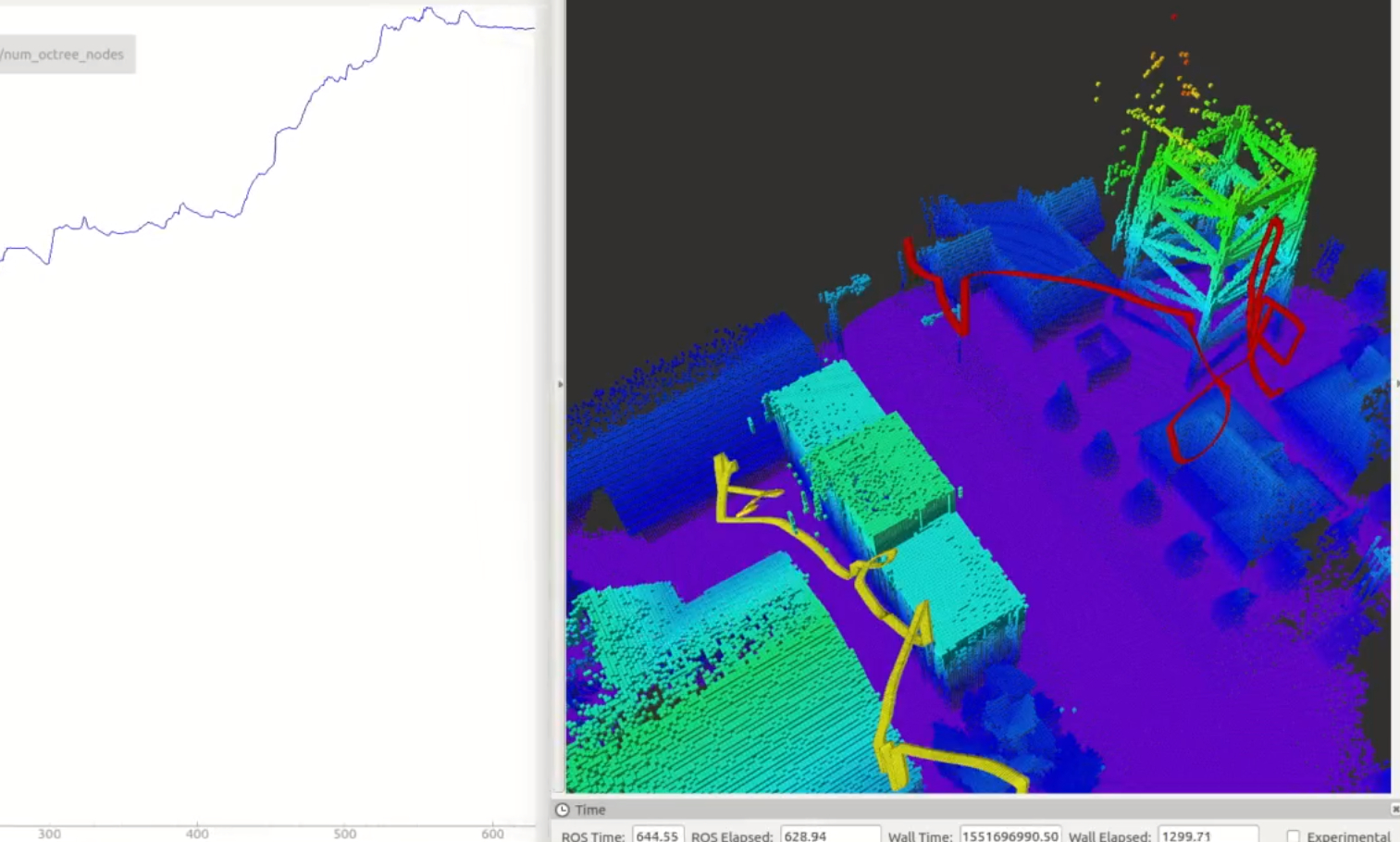
based on GAZEBO (Inria CORDES project, V. LeDoze) -
Chroma’s UAVs simulation : CORDES simulator
This project is a Gazebo based simulator that aims to make Unmaned Aerial Vehicle simulations easier to use and customize. The project’s philosophy is to create gazebo plugins and definition files for mechanical parts, sensors, and interfaces as generic as possible in order to use later them as plug and play “lego” bricks. The components are developed to be as physical representative as possible, especially on the aerodynamics of the UAV’s mechanical parts. The project allows also “Software-In-The-Loop” simulation with the PX4 firmware for flight controllers (see https://github.com/PX4/Firmware.git). It is mainly developed by Vincent Le Doze, funded by the Inria ADT CORDES project, in the Chroma team/CITI lab.

-
ProBT
Formerly known as OPL, ProBT is a C++ library for developing efficient Bayesian software. It is available for Linux, Unix, PC Windows (Visual C++), MacOS9, MacOSX and Irix systems. The ProBT library has two main components: (i) a friendly Application Program Interface (API) for building Bayesian models, and (ii) a high-performance Bayesian Inference Engine (BIE) allowing to execute all the probability calculus in exact or approximate way. ProBT is now commercialized by our start-up Probayes; it represents the main Bayesian programming tool of the e-Motion project-team, and it is currently used in a variety of external projects both in the academic and industrial field (e.g. for the European project BACS and for some industrial applications such as Toyota or Denso future driving assistance systems).
-
MobileRobotToolkit
This toolkit offers mainly a 3D simulator integrating physics engine for mobile robots. It has been designed to be interfaced with ROS. It is developed at Inria Rhône-Alpes (e-Motion team) and is used within Proteus, a French ANR project. This toolkit is currently developed under Linux, but can be ported to Windows and OSX. It is developed in C/C++.
-
Bayesian Occupation Filter (BOF) Toolbox
The BOF toolbox is a C++ library that implements the Bayesian Occupation Filter. It is often used for modelling dynamic environments. It contains the relevant functions for performing bayesian filtering in grid spaces. The output from the BOF toolbox are the estimated probability distributions of each cell’s occupation and velocity. Some basic sensor models such as the laser scanner sensor model or gaussian sensor model for gridded spaces are also included in the BOF toolbox. The sensor models and BOF mechanism in the BOF toolbox provides the necessary tools for modelling dynamic environments in most robotic applications. This toolbox is patented under two patents : “Procédé d’assistance à la conduite d’un véhicule et dispositif associé” n° 0552735 (9 september 2005) and “Procédé d’assistance à la conduite d’un véhicule et dispositif associé amélioré” n° 0552736 (9 september 2005)
 INSA de Lyon
INSA de Lyon Labo. CITI-Inria
Labo. CITI-Inria