
Valse team performs in the domains of automatic control, dynamical systems, estimation and stabilization. Our developments are focused on the theoretical and applied aspects related to control and estimation of large-scale multi-sensor and multi-actuator systems based on the use of the theories of finite-time/fixed-time/hyperexponential convergence and homogeneous systems. The Lyapunov function method and other methods of analysis of dynamical systems form a basis for the studies in Valse team.
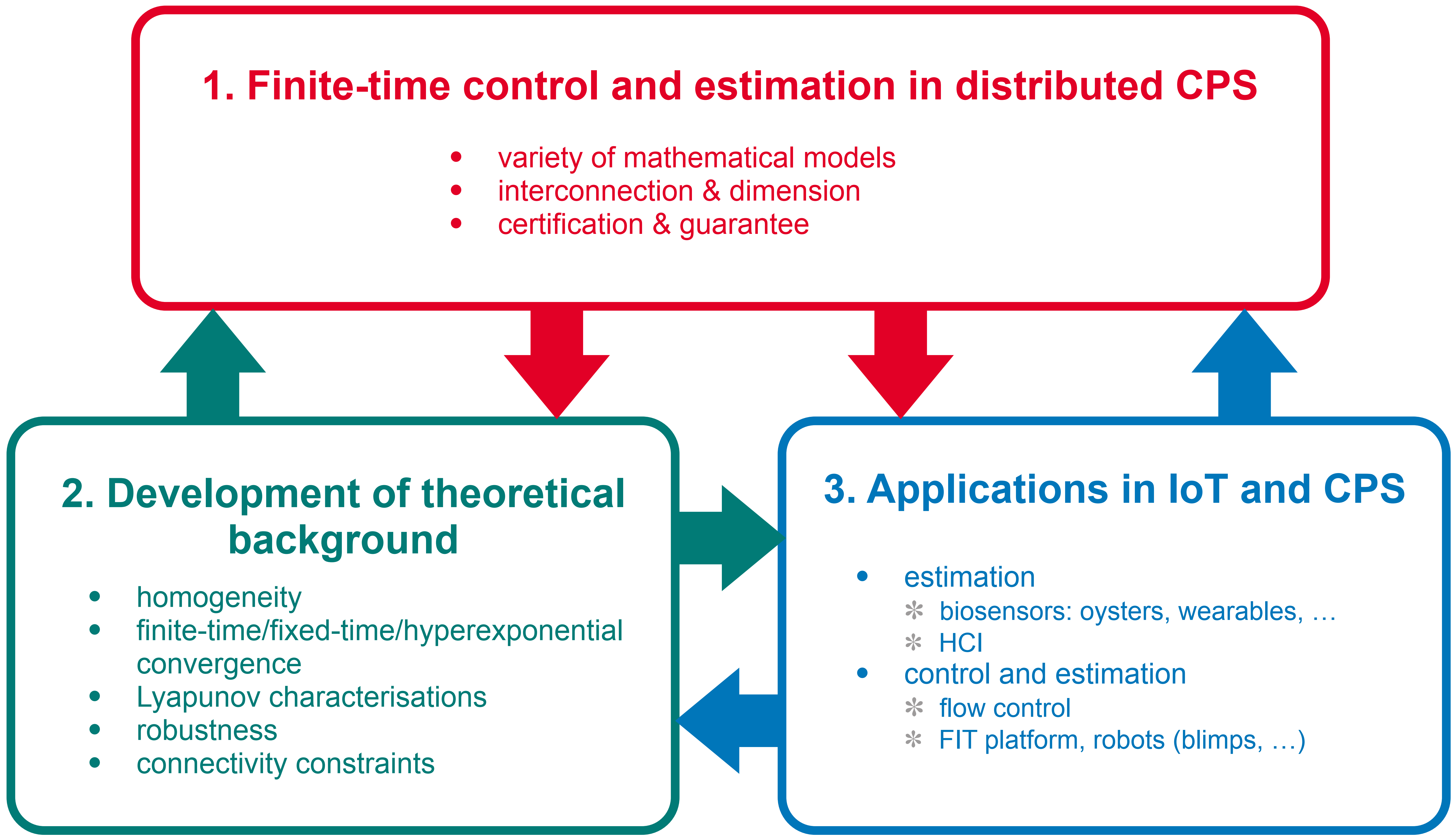
The basic idea of research for the team is that a fast non-asymptotic convergence of the regulation and estimation errors increases reliability of intelligent distributed actuators and sensors in complex scenarios, such as in interconnected cyber-physical systems.
Projects
Ongoing:
International:
- Inria Challenge with Naval Group and IIT Delhi: Improved Bearings-only Target Motion Analysis Using AI Tools
- PHC Aurora Project with University of Agder: Equivalent nonlinear control methods for digitalization in robotics and autonomous systems
- ECOS-Nord, Mexico: Artificial Intelligence-based Control Approaches for Multiple Mobile Robots
National:
- ANR NOCIME: New Observation and Control Issues Motivated by Epidemiology
- ANR SyNPiD: Synchronization in power networks with periodic dynamics
Regional:
-
Project STARS: “Practical design for interconnected CPSs by synchronization enforcement” by Jin Gyu Lee
Industry:
Past:
International:
- Inria Northern European Associate Team WeCare with Uppsala University: Efficient Estimation and Control Algorithms in Wearable Devices for Health and Care
- H2020 EJC UCoCoS: Understanding and Controling Complex Systems
- Inria Northern European Associate Team RECoT with IBM, Ireland: Robust estimation and control with time constraints
- InterReg SYSIASS : Autonomous and Intelligent Healthcare System
- FP7 HYCON2 : Highly-complex and networked control systems
- European GDR : Time Delay Systems PHC Volubilis PHC Galileo
- Inria Associate Team HoTSMoCE with UNAM, Mexico: Homogeneity Tools for Sliding Mode Control and Estimation
National:
- ANR Digitslid: Différentiateurs et commandes homogènes par modes glissants multivalués
en temps discret: l’approche implicite - ANR Finite4SoS: Finite-time Control and Estimation for Systems of Systems
- ANR WaQMoS: Coastal waters quality surveillance using bivalve mollusk-based sensors
- Inria Project Lab COSY: Real time control of synthetic microbial communities
- CPER DATA “ControlHub“
- CPER ELSAT “Contratech”
- ANR TurboTouch: High-performance touch interactions
- ANR Rocc-Sys: Robust Control of Cyber-Physical Systems
- ANR CHASLIM: Towards efficient sliding-mode control: chattering reduction, disturbance rejection and numerical toolbox
- Inria ADT SENSROB: Robotics and Wireless Sensor and Actuator Networks
- ARCIR ESTIREZ (Région Hauts de France): Estimation distribuée de systèmes dynamiques en réseaux
- ADT SEEC (Inria Lille)
Industry:
![]()