
The main objectives of MimeTIC are to:
- Address the complexity of real human motions
- Simulate realistic motions, behaviors and interactions of virtual humans
- Demonstrate that VR enables better motion understanding and simulation
To reach these objectives, our research is organized into three main axes:
- Motion analysis: designing innovative protocols and models to enhance knowledge on motion control for complex tasks
- Autonomous virtual humans: simulating realistic autonomous virtual humans that can interact with their virtual environment as real humans would do in the same situation
- Physical activity in virtual reality: using autonomous virtual humans to carry-out experiments on real humans and modifying experimental condition by changing the virtual environment models to improve fundamental knowledge and train people to complex motor skills
These axes are illustrated on the following analysis-synthesis loop:
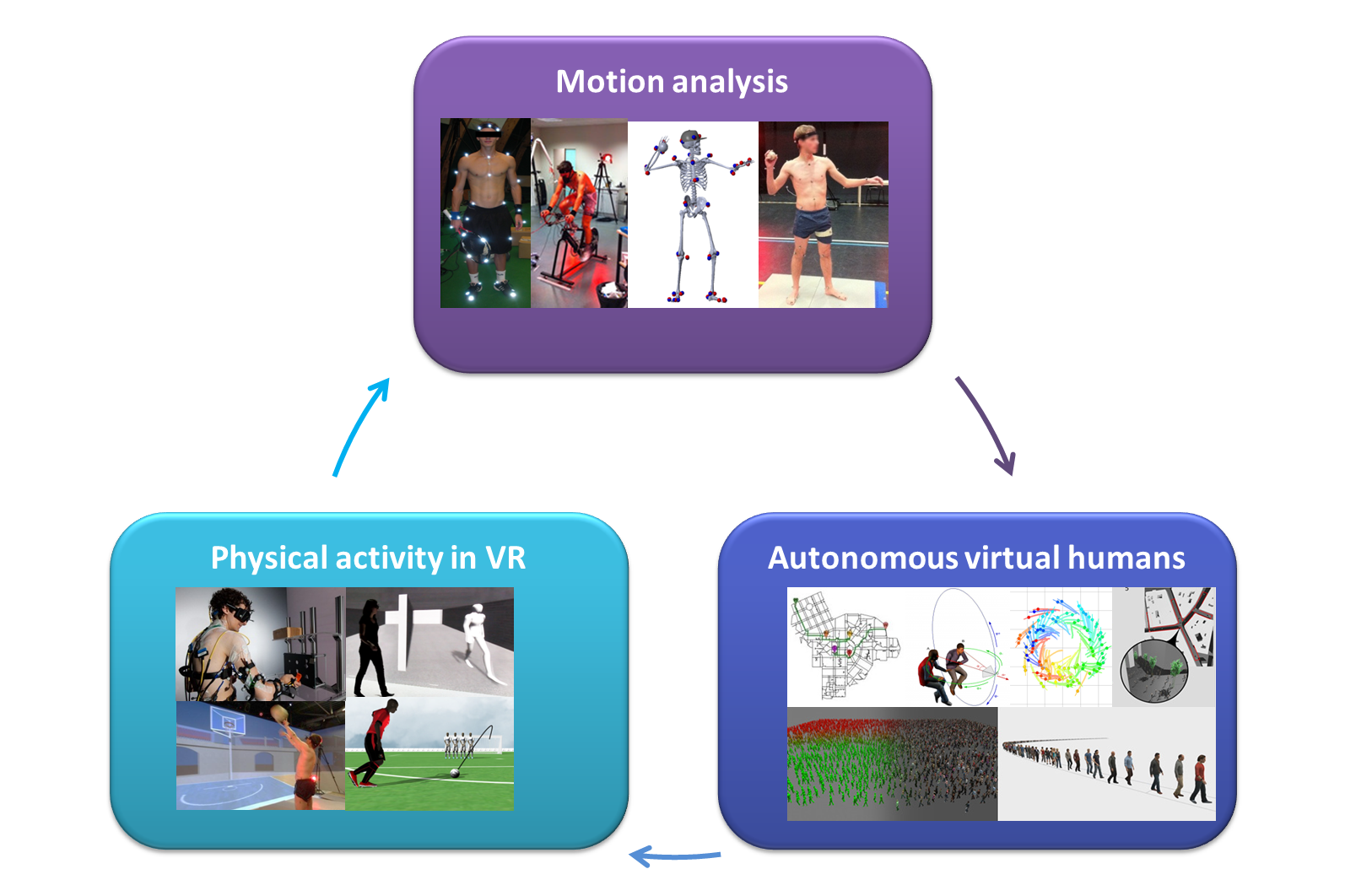
These axes are closely linked to each other. Motion analysis provides autonomous virtual humans with control laws, rules and hypotheses that are embedded in the models. This helps to reach the second objective, e.g. making virtual humans behave, move and interact as real people would do in the same situation. Models and simulators developed in “Autonomous virtual humans” are then used in “Physical activity in VR” with two main goals: 1) developing immersive methods to train complex motor skills, and 2) validating the virtual human models by analyzing whether real users perform realistic and natural interactions with the autonomous virtual humans. Analyzing this interaction also provides relevant information to improve fundamental knowledge about perception-action coupling in human activities.
Activity report 2022 (link)