
Robin Roussel, Marie-Paule Cani, Jean-Claude Léon, Niloy Mitra
Computers and Graphics, 2018
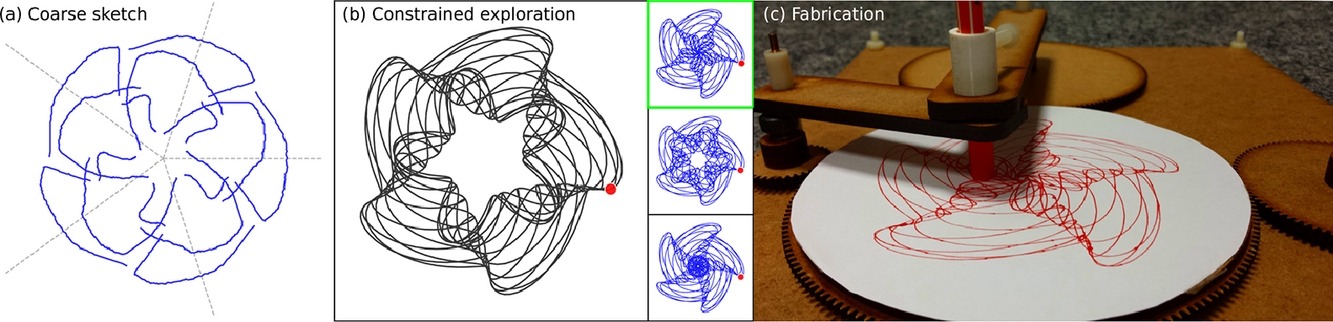
Overview of our design workflow. The user first selects a mechanically feasible drawing by providing a rough sketch (a), and is then able to interactively explore local alternatives (b) by defining visual constraints directly on the pattern (here, the cusp position). The resulting machine is automatically exported to laser cutter profiles for fabrication. (c).
Abstract
Mechanical devices are ubiquitous in our daily lives, and the motion they are able to transmit is often a critical part of their function. While digital fabrication devices facilitate their realization, motion-driven mechanism design remains a challenging task. We take drawing machines as a case study in exploratory design. Devices such as the Spirograph can generate intricate patterns from an assembly of simple mechanical elements. Trying to control and customize these patterns, however, is particularly hard, especially when the number of parts increases. We propose a novel constrained exploration method that enables a user to easily explore feasible drawings by directly indicating pattern preferences at different levels of control. The user starts by selecting a target pattern with the help of construction lines and rough sketching, and then fine-tunes it by prescribing geometric features of interest directly on the drawing. The designed pattern can then be directly realized with an easy-to-fabricate drawing machine. The key technical challenge is to facilitate the exploration of the high dimensional configuration space of such fabricable machines. To this end, we propose a novel method that dynamically reparameterizes the local configuration space and allows the user to move continuously between pattern variations, while preserving user-specified feature constraints.
We tested our framework on several examples, conducted a user study, and fabricated a sample of the designed examples.