J'ai soutenu ma thèse à l'Université de Rennes 1 en décembre 2010, et j'ai rejoint l'équipe Lagadic en 2011 pour y poursuivre mes recherches en tant que postdoc.
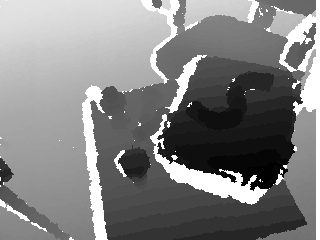
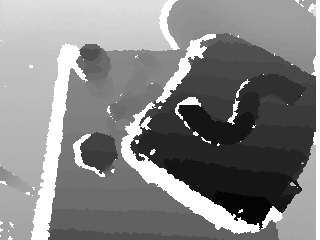
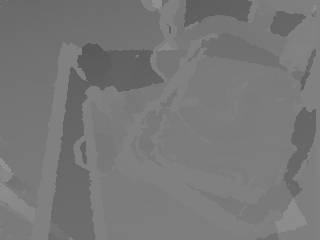
Dans ces travaux nous proposons de réaliser des tâches de positionnement 3D en utilisant directement les cartes de profondeur fournies par un capteur de type RGB-D. Cette approche à le double avantage d'être directe (ie sans étape de calcul de la pose 3D) et dense (ie sans étape d'extraction et mise en correspondance d'éléments caractéristiques). La tâche est exprimée directement sous la forme d'une erreur à réguler entre une carte de profondeur observée et une carte de profondeur de référence acquise à la position désirée. Cette approche est en outre robuste à des occultations partielles ou des changements dans la scène observée.
|
|
|
|
|
|
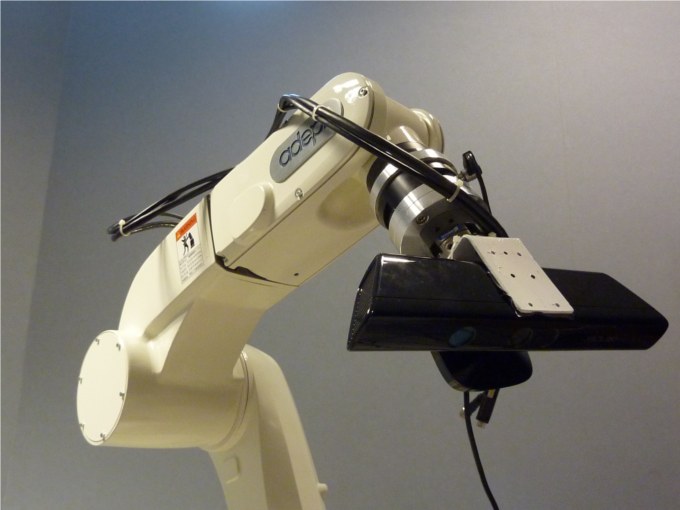
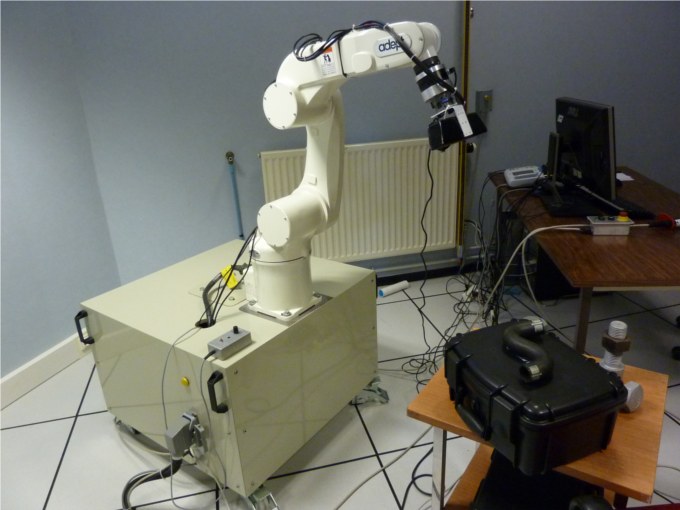
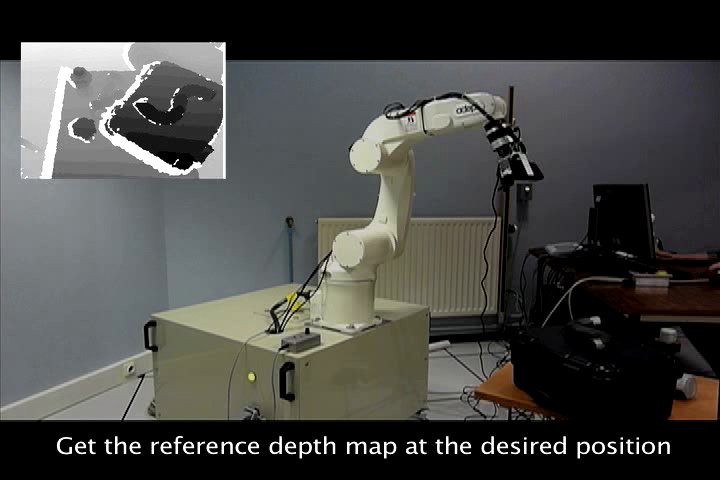
L'approche proposée a été testée et validée dans des tâches de positionnement d'un système robotique Viper d'ADEPT, équipé d'une Kinect.
|
Dans ces travaux nous proposons un algorithme de suivi basé modèle adapté à la localisation et à la navigation d'un drone en intérieur. Etant donné un modèle 3D de l'environnement, le drone se localise à l'aide d'un algorithme multi-hypothèses. L'estimation de la pose obtenue est fusionnée avec les données inertielles pour obtenir une mesure de la vitesse de translation de l'appareil. Une commande hiérachique permet alors d'asservir le drone en position.

|
|
|
|
L'approche proposée a été testée et validée sur un quadri-rotor développé par le CEA-LIST.
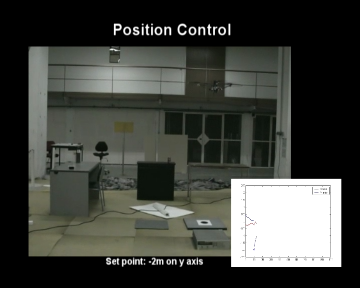
| 3D model-based tracking for UAV position control IEEE IROS'10  |

| Using multiple hypothesis in 3D model-based tracking IEEE ICRA'10 |
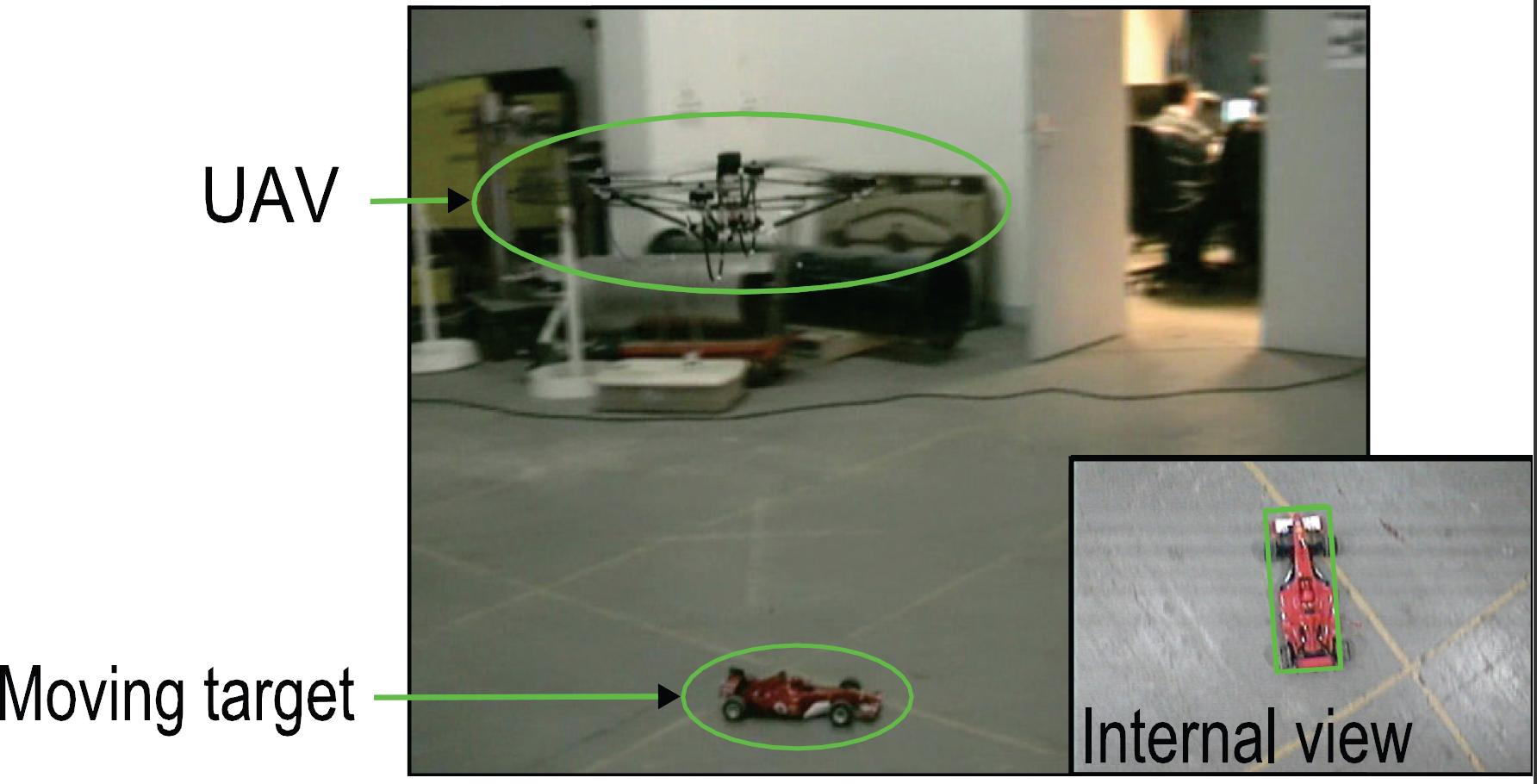
Ces travaux proposent une méthode de suivi de cible mobile. Le suivi visuel estime la position, l'orientation et la taille de l'objet dans l'image à partir d'une représentation par histogrammes de couleur multi-noyaux La méthode de suivi utilise un filtre particulaire pour assurer la robustesse à de brèves occultations. L'information obtenue est utilisée pour asservir la position et le lacet du mini-drone.
L'approche a été validée pour le suivi d'une voiture télécommandée, avec des occultations (passage sous des chaises), changements de direction et d'échelle.
L'algorithme de suivi a été présenté dans :
IEEE ICRA'09
Liste complète (et fichiers postcript ou pdf si disponibles)
|
| Lagadic
| Plan du site
| Équipes
| Publications
| Démonstrations
|
Irisa - Inria - Copyright 2014 © Projet Lagadic |