Creation date : October, 21 2005
Last modification : September, 27 2007

|
Contact : Alexandre Krupa Creation date : October, 21 2005 Last modification : September, 27 2007 |
|
Three-dimensional ultrasound imaging is used in numerous medical applications such as vascular imaging, cardiology, obstetrics, neurosurgery and per-operative imagery (during surgical interventions).
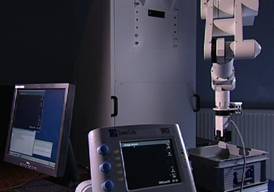
Our research aim is to optimize 3D ultrasound imaging by the use of a robotic system holding a conventional 2D ultrasound probe. The principle consists of measuring the relative displacement between each image captured by the ultrasound probe in order to position them in a 3D frame. In our approach we use a 6 degrees of freedom medical robot as the localization system and also to automatically move the 2D ultrasound probe.
In order to obtain a good accuracy of the 3D reconstruction, it is crucial to know perfectly :
Usually, these parameters are identified during an initial step where the clinician has to capture a set of 2D ultrasound images of a known object for different positions and orientations of the probe. This procedure is laborious for the clinician and will influence the accuracy of the 3D imaging. Therefore, we proposed to automate this spatial calibration procedure.
The robotic task consists in automatically positioning the ultrasound image plane on a 3D fixed point materialized by the intersection of two converging nylon yarns (straight lines) immersed in a box full of water. To achieve it, we developed a new visual servoing technique based on 2D ultrasound images to control the motion of the ultrasound probe. The visual task consists in centering the two image points, corresponding to the sections of the 2 nylon yarns, on a target point indicated in the ultrasound image. It means that when the 2 image points are fused on the target, then the ultrasound probe is correctly positioned to view the 3D fixed point. As this visual task requires only 4 degrees of freedom, we use the 2 remaining degrees of freedom of the robot to reach a given probe orientations. Several positioning with different configuration of the probe allows then to identify the spatial parameters of the system thanks to a non-linear minimization technique.
| This video (3.7 Mo mpeg1 file) shows the automatic positioning of the probe needed to calibrate our robotized 3D ultrasound imaging system. It is performed thanks to visual servoing based on ultrasound images. |


 This video (3.5 Mo mpeg1 file) shows the automatic 3D ultrasound imaging of a medical phantom.
This video (3.5 Mo mpeg1 file) shows the automatic 3D ultrasound imaging of a medical phantom.

|
| Lagadic
| Map
| Team
| Publications
| Demonstrations
|
Irisa - Inria - Copyright 2009 © Lagadic Project |