Acteurs : Inria/ACCENTAURI, Cerema/GIPI, Inria/FUN, Inria/COATI, Cerema/ENDSUM, Cerema/GeoCoD, Cerema/DTerSO, Cerema/DTerMed.
La captation de données est au cœur de la gestion intégrée des infrastructures routières et des OA. Cependant, ces captations se réalisent par définition dans des environnements très contraignants (ex. : accessibilité réduite), voire hostiles (ex. : conditions météorologiques). Les capteurs sont tous de natures différentes avec des encombrements, sensibilité, moyens de communication hétérogènes, fournissant des données hétérogènes en taille, type et fréquences d’acquisition. Collecter ces données présente donc un réel défi devant faire intervenir des protocoles de communications agiles et adaptatifs, des déploiements de flottes de robots autonomes, des planifications de parcours de véhicules de services ainsi que la mise en place de nouveaux services tels que la géolocalisation. Les données collectées dans le cadre de cet axe 1 nourriront les axes 2 (modélisation) et 3 (extraction de connaissance). Inversement, il recevra des recommandations de ces deux axes pour améliorer la précision et la pertinence des données.
Cet axe se décompose en 3 tâches :
Tâche 1.1 : Étude de déploiement des capteurs
Acteurs : Inria/FUN, Inria/COATI, Inria/ACENTAURI, Cerema/ENDSUM, Cerema/DTerSO, Cerema/DTerMed.
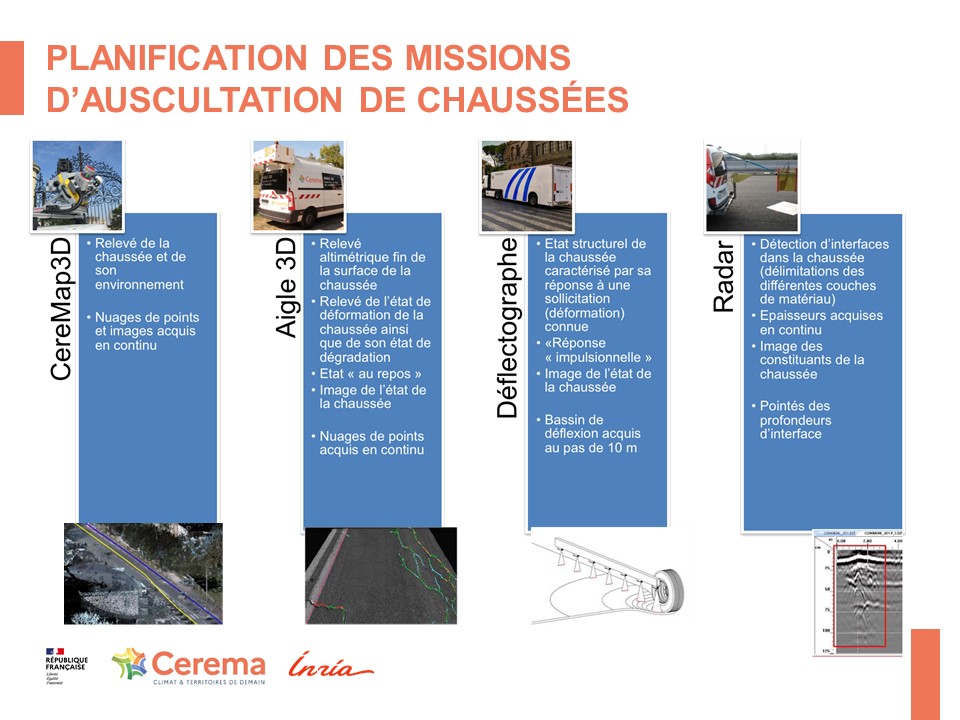
Cette tâche étudiera pour différents cas d’usage les lieux de captation les plus adaptés pour chaque donnée. Cette étude prendra en compte les besoins métier mais également les contraintes de déploiement physique (accessibilités, environnement radio, possibilité d’alimentation électrique ou de récupération d’énergie ambiante) et besoins de déploiement pour la collecte. Elle préconisera les moyens les plus adaptés pour collecter les données en fonction des lieux de collecte, de la fréquence nécessaire et des coûts de collecte : collecte radio, multi-sauts, visite de robots/drones, etc.
Tâche 1.2 : Services de géolocalisation
Acteurs: Inria/ACENTAURI, Inria/FUN, Cerema/ENDSUM, Cerema/DTerSO, Cerema/DTerMed, Cerema/GéoCoD.
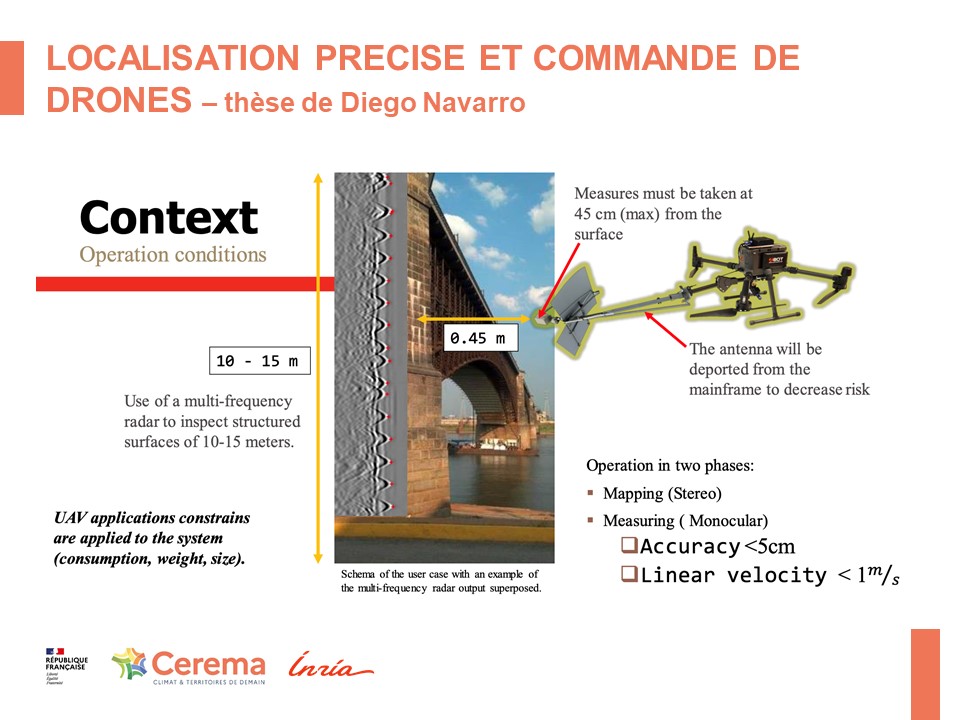
Afin de pouvoir prendre les mesures de façon fiable et les positionner précisément, des services de géolocalisation embarqués sont nécessaires. Ils peuvent servir à la navigation de drones ou robots autonomes, à la planification de trajectoires ou encore à localiser le lieu de captation. Chaque application apportera ses contraintes de mise en œuvre et besoins en précision qui lui sera propre, faisant donc appel à des méthodes de positionnement spécifiques et variées. Les différentes techniques qui seront utilisées, adaptées, combinées pour chaque étude incluent entre autres la radiolocalisation, le SLAM et le GPS. Cette tâche aura pour but de concevoir une technique de positionnement permettant de répondre aux besoins applicatifs afin de fournir aux autres tâches de ce WP des informations précises de localisation.

Tâche 1.3 : Auto-déploiement de flotte de robots
Acteurs : Inria/ACENTAURI, Inria/FUN, Cerema/ENDSUM, Cerema/DTerSO, Cerema/DTerMed, Cerema/GéoCoD, Cerema/GITEX.
Dans certains cas, la collecte d’information peut nécessiter l’envoi de flotte de robots autonomes, terrestres ou aériens (drones). Le but de cette tâche est de concevoir les techniques d’auto-déploiement afin de permettre à chaque entité de la flotte de savoir où se déplacer, comment se déplacer, et ce en gardant la connexion avec les autres et en réalisant la tâche demandée. Ces techniques et différents mécanismes seront des algorithmes locaux et adaptatifs qui prendront en entrée les contraintes applicatives et du lieu dans lequel la donnée doit être collectée (via des canalisations, en hauteur sous des ponts, en différents points d’un barrage, etc.). Elles seront combinées avec les résultats de la tâche T1.2 (localisation) et des protocoles de communication potentiellement multi-sauts tels que définis en tâche T1.1. Ces méthodes s’accompagneront d’aide au pilotage du drone : automatisation de certaines fonctions de pilotage (par exemple stabiliser à une distance donnée d’un ouvrage, maintenir une vitesse constante) et analyse de situation pour une transition vers le pilotage manuel en cas de problèmes.
Tâche 1.4 : Planification de mission et adaptation dynamique
Acteurs : Inria/COATI, Inria/ACCENTAURI, Cerema/GIPI.
Nous nous intéressons à l’optimisation de la tournée des véhicules permettant de mesurer l’état des routes. La planification initiale de la tournée d’un véhicule cherche à minimiser le temps nécessaire pour parcourir l’ensemble des routes à analyser. Cette planification peut prendre en compte différentes contraintes comme la nécessité de passer plusieurs fois sur une route large, la consommation de carburant ou encore les temps de pauses du conducteur. Cependant, des erreurs de mesures peuvent survenir lors de la traversée de certaines routes (la trajectoire du véhicule n’est pas parfaite) et il est alors nécessaire de repasser sur ces routes pour acquérir les données manquantes et compléter la mesure. Si les erreurs de mesures sont détectées suffisamment tôt (quasi en temps-réel), il est possible d’adapter dynamiquement la tournée initialement planifiée (du véhicule ayant réalisé la mesure ou d’un autre véhicule si plusieurs sont utilisés) pour repasser là où la mesure doit être refaite ou complétée.