


{kind=link}

Two new papers has been accepted in IEEE Robotics and Automation Letters thanks to Samuel Felton (Rainbow/Lacodam teams) and Xi Wang (Mimetic team). These papers will also be presented at IEEE ICRA in Philadelphia in may 2022.
- S. Felton, P. Brault, E. Fromont, E. Marchand. Visual Servoing in Autoencoder Latent Space. IEEE Robotics and Automation Letters, To appear, 2022.



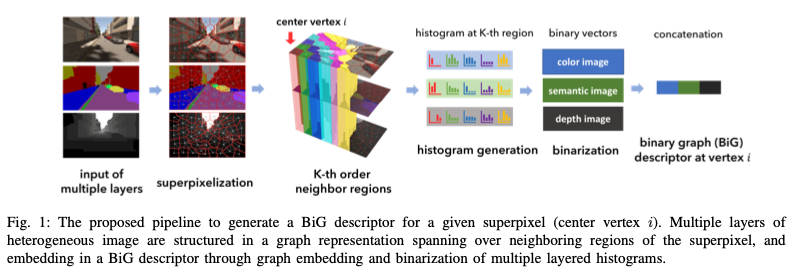
- X. Wang, M. Christie, E. Marchand. Binary Graph Descriptor for Robust Relocalization on Heterogeneous Data. IEEE Robotics and Automation Letters, To appear, 2022.
S. Felton, P. Brault, E. Fromont, E. Marchand. Visual Servoing in Autoencoder Latent Space. IEEE Robotics and Automation Letters, To appear, 2022. ![]()
![]()
Visual servoing (VS) is a common way in robotics to control a robot motion using information acquired by a camera. This approach requires to extract visual information from the image to design the control law. The resulting servo loop is built in order to minimize an error expressed in the image space. We consider a direct visual servoing (DVS) from whole images. We propose a new framework to perform VS in the latent space learned by a convolutional autoencoder. We show that this latent space avoids explicit feature extraction and tracking issues and provides a good representation, smoothing the cost function of the VS process. Besides, our experiments show that this unsupervised learning approach allows us to obtain, without labelling cost, an accurate end-positioning, often on par with the best DVS methods in terms of accuracy but with a larger convergence area.
This paper is a collaboration with the Irisa Lacodam team
X. Wang, M. Christie, E. Marchand. Binary Graph Descriptor for Robust Relocalization on Heterogeneous Data. IEEE Robotics and Automation Letters, To appear, 2022. ![]()
![]()
![]()
In this paper, we propose a novel binary graph descriptor to improve loop detection for visual SLAM systems. Our contribution is twofold: i) a graph embedding technique for generating binary descriptors which conserve both spatial and histogram information extracted from images; ii) a generic mean of combining multiple layers of heterogeneous data into the proposed binary graph descriptor, coupled with a matching and geometric checking method. We also introduce an implementation of our descriptor into an incremental Bag-of-Words (iBoW) structure that improves efficiency and scalability, and propose a method to interpret Deep Neural Network (DNN) results. We evaluate our system on synthetic and real datasets across different lighting and seasonal conditions. The proposed method outperforms state-of-the-art loop detection frameworks in terms of relocalization precision and computational performance, as well as displays high robustness against cross-condition datasets.
This paper is a collaboration with irisa Hybrid team.