
Human Action and Gesture Recognition Using Joint Quadruples
Description | Publications | Code
G. Evangelidis, G. Singh, R. Horaud
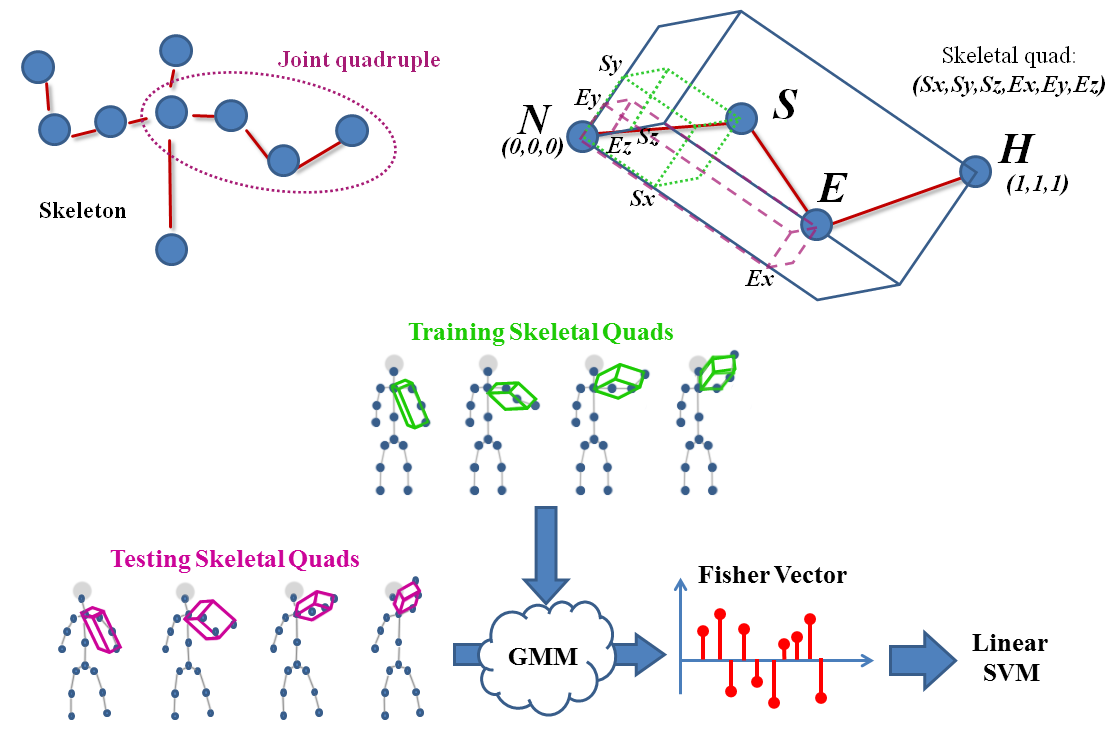
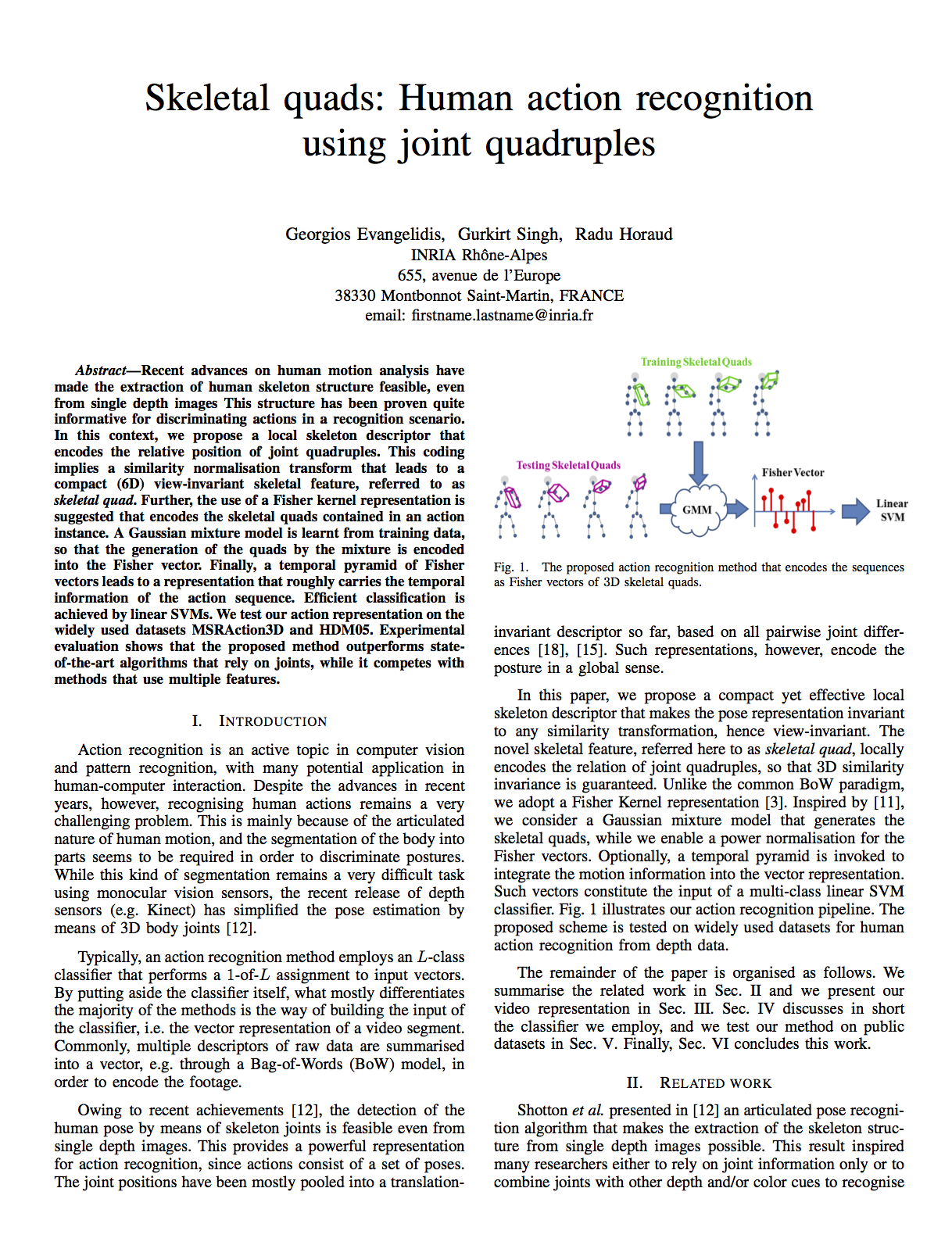
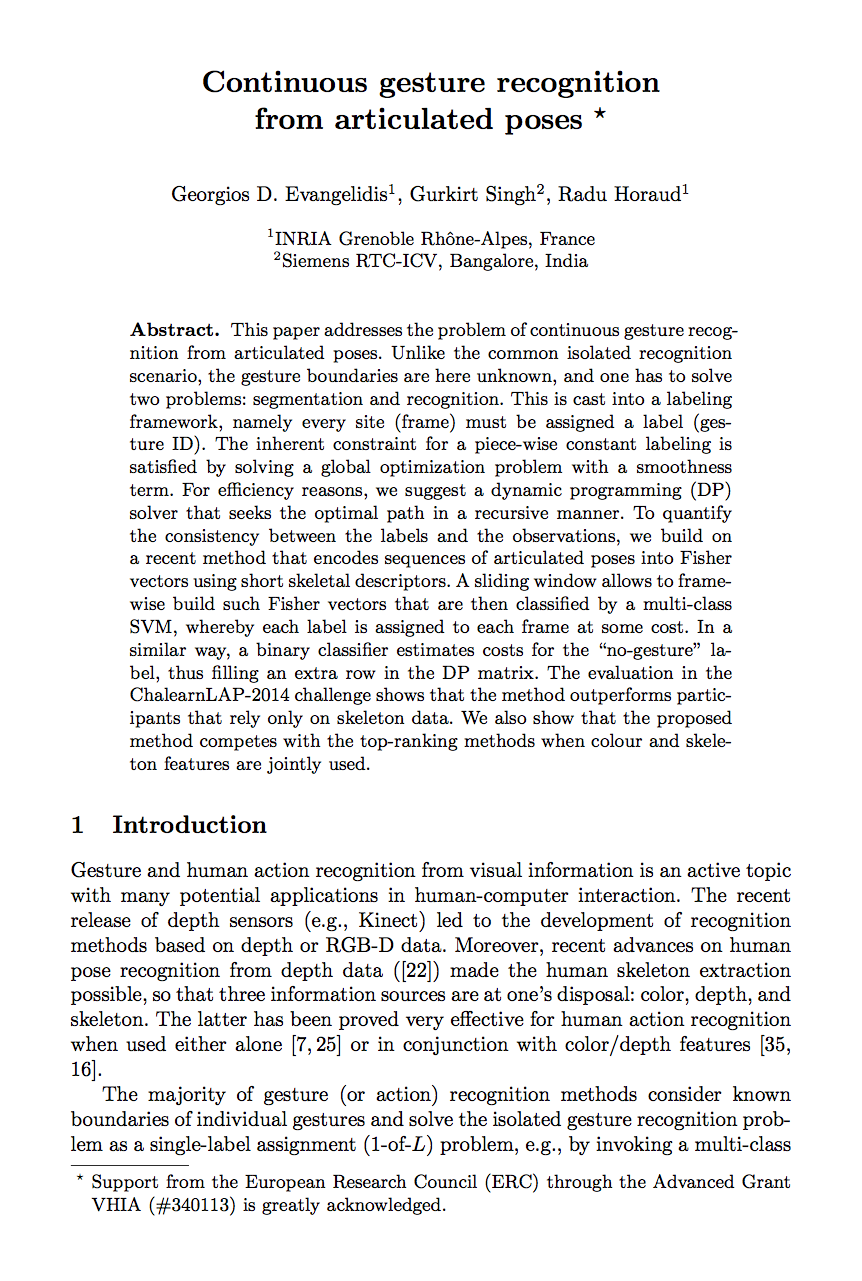
| Recent advances on human motion analysis have made the extraction of human skeleton structure feasible, even from single depth images. This structure has been proven quite informative for discriminating actions in a recognition scenario. In this context, we propose a local skeleton descriptor that encodes the relative position of joint quadruples. Such a coding implies a similarity normalisation transform that leads to a compact (6D or 5D) view-invariant skeletal feature, referred to as skeletal quad. In the references below, we use this descriptor in conjunction with FIsher kernel in order to encode gesture or action (sub)sequences. The short length of the descriptor compensates for the large inherent dimensionality associated to Fisher vectors. We investigate the performance in both isolated (ICPR 2014) and continuous (ECCV Workshop 2014) recognition scenario. Keywords: skeleton joints, action/gesture recognition, Fisher vector |
 |
ICPR 2014
 Download PDF |
Skeletal Quads: Human action recognition using joint quadruples Bibtex: @inproceedings{Evangelidis-ICPR-2014, author = {Evangelidis, G. and Singh, G. and Horaud, R.}, title = {Skeletal Quads:Human action recognition using joint quadruples}, booktitle = {22nd International Conference on Pattern Recognition (ICPR)}, year = {2014} } |
ECCV Workshop 2014
 Download PDF |
Continuous gesture recognition from articulated poses Bibtex: @inproceedings{Evangelidis-ECCVW-2014, author = {Evangelidis, G. and Singh, G. and Horaud, R.}, title = {Continuous gesture recognition from articulated poses}, booktitle = {ECCV Workshops}, year = {2014} } |
Download the code for Skeletal quads. Please see the README file.