
Switching Linear Inverse-Regression Model for Tracking Head Pose
V. Drouard, S. Ba, and R. Horaud
IEEE Winter Conference on Application of Computer Vision (WACV’17)
IEEE Publication | HAL Publication | Abstract | BibTex | Results | Matlab code | Acknowledgement
| We propose to estimate the head-pose angles (pitch, yaw, and roll) by simultaneously predicting the pose parameters from observed high-dimensional feature vectors, and tracking these parameters over time. This is achieved by embedding a Gaussian mixture of linear inverse-regression model into a dynamic Bayesian model. The use of a switching Kalman filter (SKF) enables a principled way of carrying out this embedding. The SKF governs the temporal predictive distribution of the pose parameters (modeled as continuous latent variables) conditioned by the discrete variables associated with the mixture of linear inverse-regression formulation. We formally derive the equations of the proposed switching linear regression model, we propose an approximation that is both identifiable and computationally tractable, we design an EM procedure to estimate the SKF parameters in closed-form, and we carry out experiments and comparisons with other methods using recently released datasets.. | 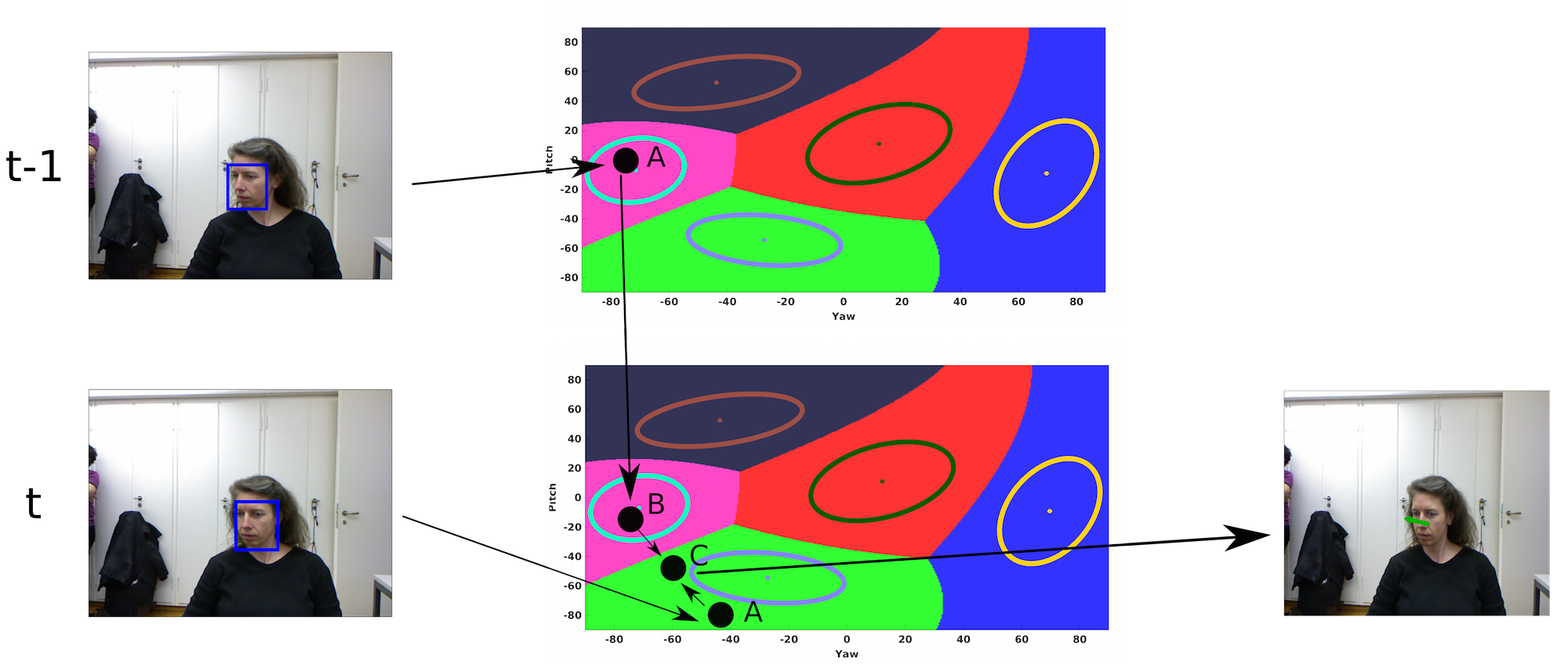 |
Publication
 Download PDF |
Switching Linear Inverse-Regression Model for Tracking Head Pose V. Drouard, S. Ba, R. Horaud IEEE WACV, 2017 Bibtex: @inproceedings{drouard2017switching,
title={Switching Linear Inverse-Regression Model for Tracking Head Pose},
author={Drouard, Vincent and Ba, Sileye and Horaud, Radu},
booktitle={IEEE Winter Conference on Applications of Computer Vision},
address = {Santa Rosa, CA, United States},
year={2017},
month={March}
}
|
Results on Head-Pose Tracking
Code
To be added
Acknowledgement
Funding from the European Union FP7 ERC Advanced Grant VHIA (#340113) is greatly acknowledged.