
BEWARE : Obsolete platform
The MIXCAM laboratory is a multiple-camera multiple-PC hardware/software platform that combines high-resolution color (RGB) cameras with low-resolution time-of-flight (TOF) cameras. The cameras are arranged in “units”, where each unit is composed of two RGB cameras and one TOF camera (left image). Currently the system is composed of four such units (right image), or a total of eight RGB and four TOF cameras. Over years, in collaboration with 4D View Solutions, we have developed and maintained software packages for camera, multiple-camera, and cross-modal calibration, 3D reconstruction, multiple-camera stereo, TOF-stereo fusion, and image-based rendering.
 |
 |
INRIA-Samsung project. During the period 2010-2012, the MIXCAM laboratory was used in collaboration with Samsung Electronics for the development of 3D content for glass-free auto-stereoscopic display. The following people were involved in the INRIA-Samsung collaboration: Miles Hansard (INRIA), Michel Amat (INRIA), Georgios Evangelidis (INRIA), Radu Horaud (INRIA), Seungkyu Lee (Samsung) and Ouk Choi (Samsung).
MIXCAM project. During the period 2014-2016, the laboratory is used by the ANR MiXCAM Project. The following people are involved in this project: Georgios Evangelidis (INRIA), Pierre Arquier (INRIA), Quentin Pelorson (INRIA), Soraya Arias (INRIA), Radu Horaud (INRIA), Richard Broadbridge (4D View Solutions), and Clément Menier (4D View Solutions).
 |
 |
 |
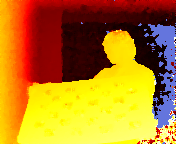
The TOF camera provides a depth image (middle, color-coded) at a resolution of 176X144 pixels and with an accuracy in depth of about 1cm. The color cameras (left and right) have a resolution of 1624X1224 pixels. These images show the calibration grid used for color-, TOF-, and cross-camera calibration.
Cameras
- RGB cameras : resolution 1624*1224 pixels. Up to 30 fps.
- TOF cameras : resolution 176*144. up to 7 fps (limit for an acceptable quality).
- PC cluster and multiple-camera acquisition hardware and software purchased from 4DView Solution.
Bibliography
Time of Flight Cameras: Principles, Methods, and Applications. Miles Hansard, Seungkyu Lee, Ouk Choi, Radu Horaud. Springer, Oct. 2012, Springer Briefs in Computer Science.


Cross-calibration of Time-of-flight and Colour Cameras. M. Hansard, G. Evangelidis, and R. Horaud. 2014. Computer Vision and Image Understanding, special issue on Camera Networks. http://arxiv.org/abs/1401.8092


Automatic Detection of Calibration Grids in Time-of-Flight Images. M. Hansard, R. Horaud, M. Amat and G. Evangelidis. Computer Vision and Image Understanding, Elsevier, Apr. 2014, vol. 121, pp. 108-118.