

 Position : Research engineer
Position : Research engineer
Affiliation : INRIA Lille – Nord Europe
Advisors : Christian Duriez
Adress : 40 Avenue Halley Bat A, 59650 Villeneuve d’Ascq, France.
E-Mail : eulalie.coevoet@inria.fr
Personal Website : http://eulaliecoevoet.com
I received a Bachelor’s degree in Mathematics from the University Claude Bernard of Lyon, France (2011), and a Master’s degree in Advanced Scientific Computing from the University of Lille, France (2013). I did my Ph.D from May 2017 to December 2018, under the direction of Christian Duriez. I’m working on real time motion control of soft robots using an optimization-based algorithm and with contact handling.
Selected publications:
Conference:
 Soft robots locomotion and manipulation control using FEM simulation and quadratic programming.
Soft robots locomotion and manipulation control using FEM simulation and quadratic programming.
E. Coevoet, A. Escande, and C. Duriez
To be presented at RoboSoft 2019
Ph.D thesis:
 Optimization-based inverse model of soft robots with contact handling.
Optimization-based inverse model of soft robots with contact handling.
Commitee: François Chaumette (Chair), Jamie Paik (Reviewer), Nicolas Mansard (Reviewer), Allison Okamura (Examiner), Hadrien Courtecuisse (Examiner), Adrien Escande (Examiner), Christian Duriez (Supervisor), 2018
Journals:
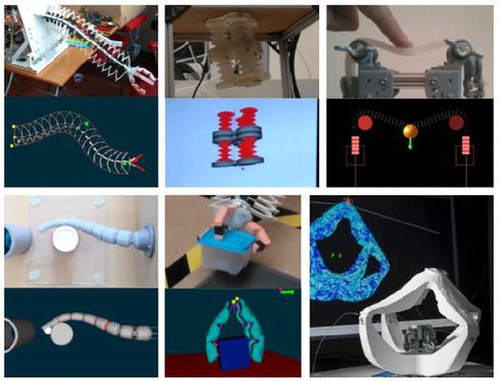 Software toolkit for modeling, simulation and control of soft robots.
Software toolkit for modeling, simulation and control of soft robots.
E. Coevoet, T. Morales-Bieze, F. Largilliere, Z. Zhang, M. Thieffry, M. Sanz-Lopez, B. Carrez, D. Marchal, O. Goury, J. Dequidt, C. Duriez
Advanced Robotics 2017, [page], [pdf]
 Optimization-based inverse model of soft robots with contact handling
Optimization-based inverse model of soft robots with contact handling
E.Coevoet, A. Escande, C. Duriez.
RA-Letter 2017 (Proc. ICRA 2017) [video] [pdf] [link]
Previous Projects:
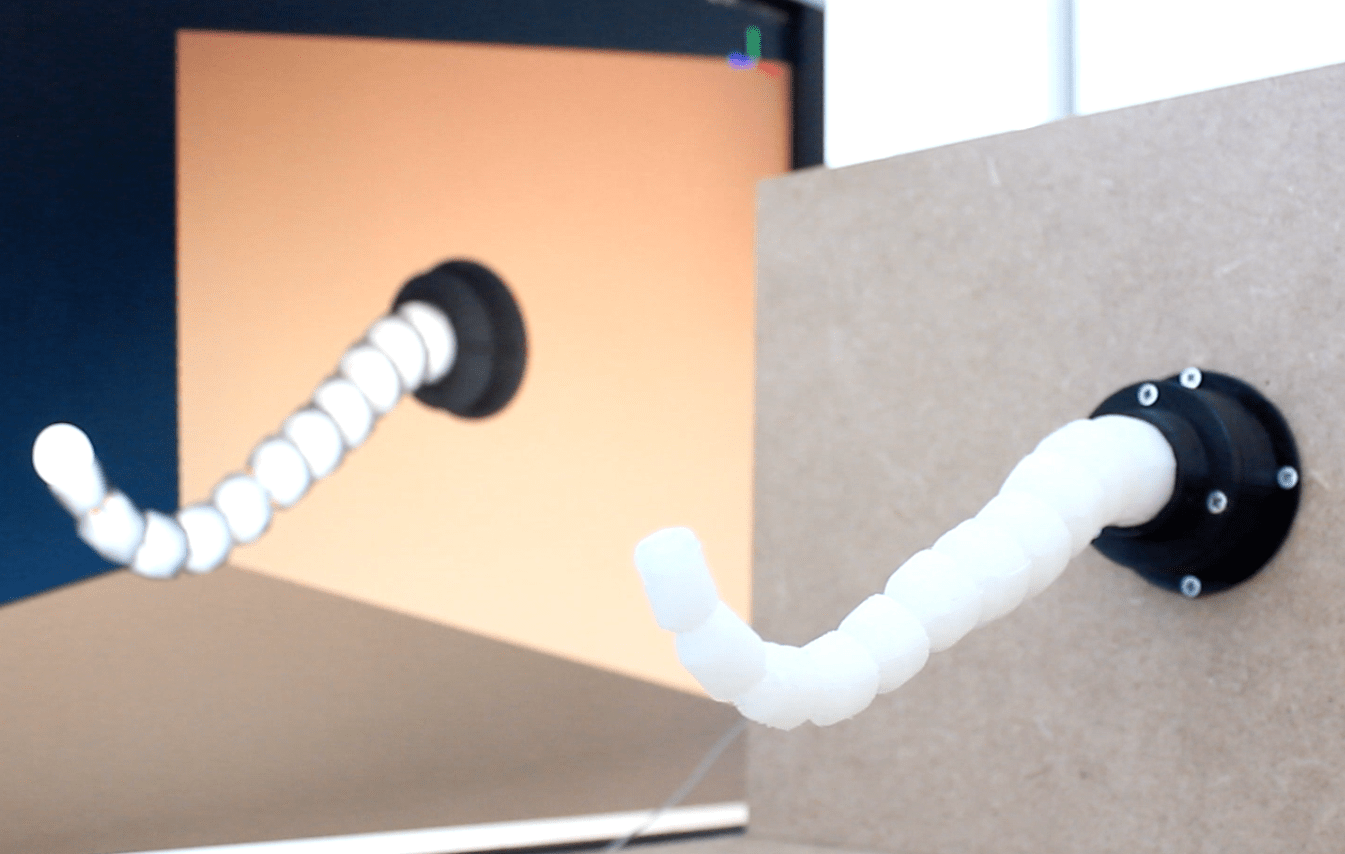
SoftRobots plugin for Sofa (2015-2017)
We developed a plugin for the simulation software SOFA. The aim of the plugin is to facilitate the modeling of a soft robot and enable its control through an inverse simulation. The real-time control of soft robots is implemented using a very fast inverse Finite Element method.
 Framework for online simulation of soft robots with optimization-based inverse model
Framework for online simulation of soft robots with optimization-based inverse model
C. Duriez, E. Coevoet, F. Largilliere, T. Morales-Bieze, Z. Zhang, M. Sanz-Lopez, B. Carrez, D. Marchal, O. Goury, J. Dequidt.
SIMPAR 2016 [pdf]
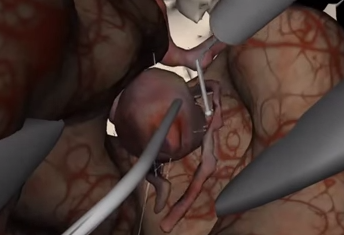
Neurosurgery simulator (2014-2015)
We developed a simulator prototype reproducing the microsurgical approach and the intracranial aneurysms clipping, with bimanual haptic feedback. The aim of this simulator is to train students to the procedure and maintain the high level of expertise that is expected.
 Vascular neurosurgery simulation with bimanual haptic feedback
Vascular neurosurgery simulation with bimanual haptic feedback
J Dequidt, E Coevoet, L Thines, C Duriez.
VRIPHYS 2015 [pdf] [link] [video]
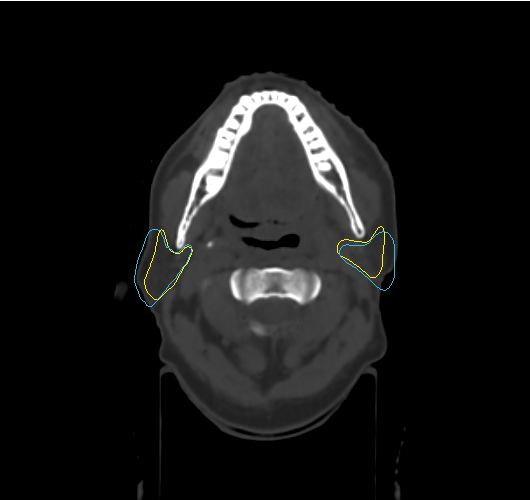
Inverse simulation for adaptive radiotherapy (2013-2014)
We introduced a new methodology for semi-automatic registration of anatomical structure deformations. The idea is to use an interactive inverse simulation of physics-based deformable model, computed in real time.
 Introducing interactive inverse FEM simulation and its application for adaptive radiotherapy
Introducing interactive inverse FEM simulation and its application for adaptive radiotherapy
E Coevoet, N Reynaert, E Lartigau, L Schiappacasse, J Dequidt, C Duriez.
MICCAI 2014 [pdf] [link] [video]