We started the SHAARE associate team, between Auctus (Inria) and the IRiS lab (Kaist) with a joint seminar. We presented to each others some of our research interests in shared haptics, to better identify the framework for our future collaboration.
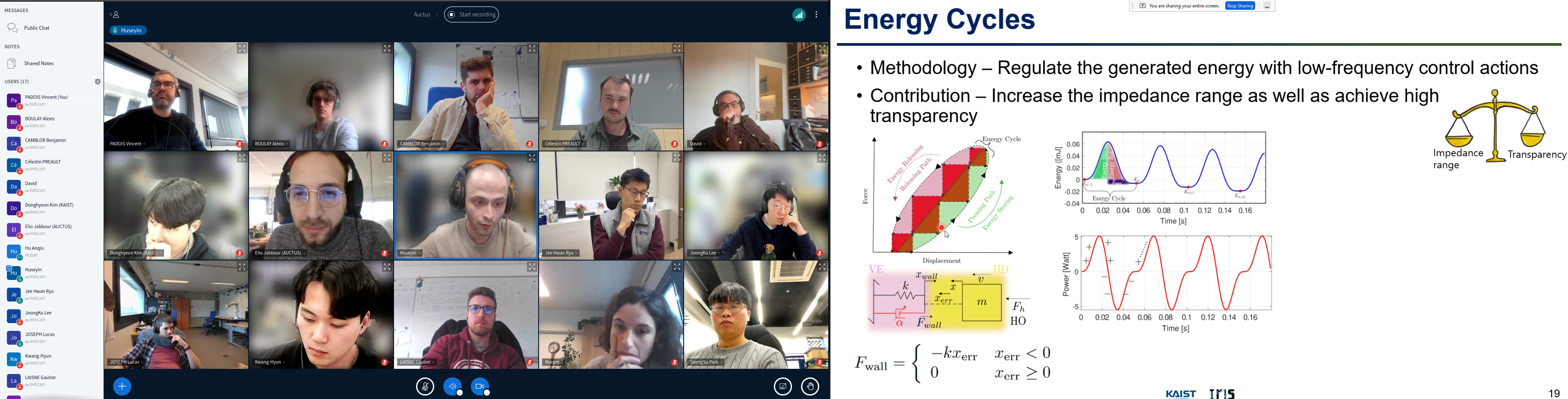
Talks Huseyin Tugcan Dinc, PhD at IRiS lab, Three passivity-based approaches for stable haptic control
Alexis Boulay, PhD at Auctus and Farm3, From Virtual Fixture to Active Constraint: a configurable haptic guide.
[Read More]

AUCTUS is an Inria Project team in collaboration with ENSC. The general objective of the team is to design robotic assistance systems or collaborative robots for Humans at work, in particular in the industrial sector.
The increase of the physical and cognitive capacities of the Homo Faber through the development of tools knows a new golden age by the advent of the collaborative robotics coupled with the artificial intelligence. Man is able to share with a machine his movement, his motor intelligence, but also his decisions. The challenge is then to design the machine part of the cybernetic couple for the successful realization of a task, while preserving the man in his physical and cognitive integrity and in his capacity of adaptation and decision.
The robotics community still tends to separate the cognitive (HRI) and physical (pHRI) aspects of human/robot interaction. One of the main challenges is to characterize the task as well as mechanical, physiological and cognitive capacities of humans in the form of physical constraints or objectives for the design of cobotized workstations. This design is understood in a large sense: the choice of the robot’s architecture (cobot, exoskeleton, etc.), the dimensional design (human/robot workspace, trajectory calculation, etc.), the coupling mode (comanipulation, teleoperation, etc.) and control. The approach then requires the contributions of the human and social sciences to be considered in the same way as those of exact sciences. The topics considered are broad, ranging from cognitive sciences, ergonomics, human factors, biomechanics and robotics.
Scientific Axes
- Analysis and modeling of behavior
- Links between Human Sciences and Artificial Intelligence
- Set analysis of postures, gestures and human movements
- Operator / robot coupling
- Optimizing the performance of an operator / robot couple
- Mediation of perceptions of an operator / robot couple
- Design of collaborative robots and robotic assistance systems
- Architectural design
- Control design
- Methodological support: experiments and technological developments
- Innovative sensors
- Experiments
Latest News

The Auctus team was happy to host the visit of Thomas Flayols and Virgile Batto, collaborators from the Gepetto team at LAAS (CNRS). They presented their recent works on the design and control of quadruped and bipedal robots. Virgile’s PhD Thesis is part of a close collaboration between the two teams about the design of a dynamic robot leg.
Talks Thomas Flayols, CNRS Research Engineer at LAAS, Ongoing research and mechatronic development on legged robots at LAAS: The ODRI open motor controllers and quadruped designs.
[Read More]
The SHAARE associate team is created in 2024 between the IRiS lab at KAIST and the Auctus team at Inria, to share our complementary methodological orientations in haptic shared control. Together, we aim at developing shared-control approaches that, either, better guide the human through adaptive haptic guidance, or adjust the robot behavior according to the human gestures.
The IRiS lab develops virtual-fixture feedback, generated from a task description given by the user.
[Read More]
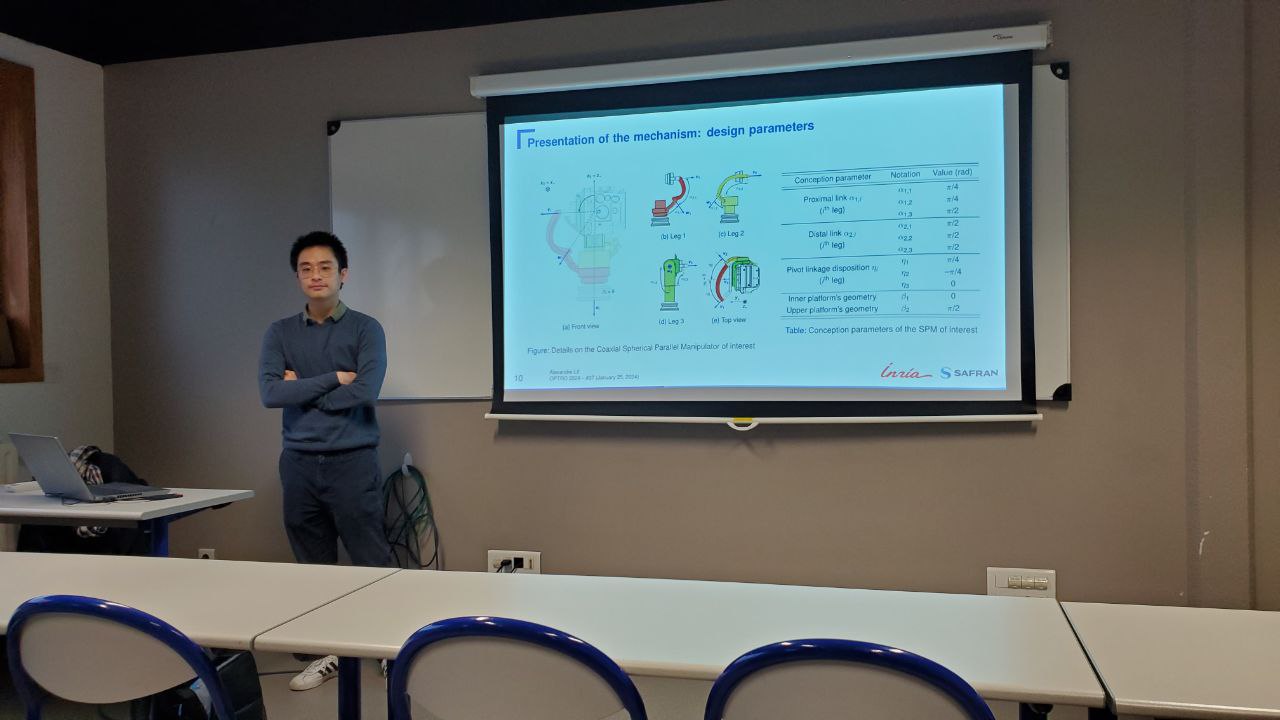

The Auctus team is delighted to receive the visit of Fabrice Rouiller and Alexandre Lê on January 24. Alexandre gave a presentation of his PhD work (CIFRE Safran Electronics & Defense) on the design of parallel robots for inertial stabilization.
The Auctus team is delighted to receive the visit of Philip Long on November 6 and 7.
Dr. Philip Long is a Lecturer in Robotics & Automation at Atlantic Technological University, Galway (ATU), Ireland and currently PI of the SFI Robomate project. His research interests include human-robot collaboration, sensor-based control of robot manipulators, cable-driven parallel robots and flexible manufacturing. He has extensive experience in technology transfer projects in robotics, having worked in both industry and academia for over 15 years.
[Read More]