Tasks sequencing: Application to a humanoid robot catching a ball while walking
Contact: Nicolas Mansard, François Chaumette
Creation Date: April 2007
Objectives and research motivations
Basically, visual servoing techniques consist in using the data provided by one
or several cameras in order to control the motions of a dynamic system. Such
systems are usually robot arms, mobile robots, or even virtual robots such as
animated virtual humanoids. These techniques are very efficient for numerous
types of robotic problems, providing accurate positioning, good robustness to
noise, stability, etc. However, the control can become difficult or even
erratic when the displacement is large. Moreover, the control is only
interested in the links between the camera and the tracked visual features. To
integrate the servo into a real complex robotic system, the control should also
make sure that it avoids undesirable configurations such as articular joint
limits, obstacle or visual occlusions.
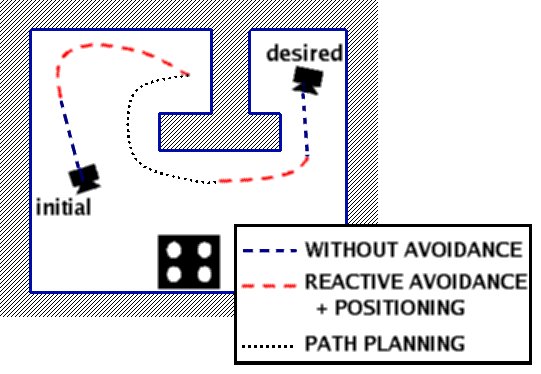
The first works addressing these problems are based of path planning
methods. However such a solution requires a lot of knowledge about the robot
and its environment. It is thus less reactive to changes of the goal, the
environments or the constraints. Our work has been mainly focused on a
reactive way to solve this problem. In this meaning, it is more similar
to switching control laws or sequencing control laws.
High-level control
|
The idea was to propose a high-level execution controller that enables
or disables some parts of the global control law to ensure global convergence
and obstacle avoidance. Far from any obstacle, the robot moves according to
a full task constraining all its degrees of freedom. When it comes closer to a
configuration to avoid, the higher-level controller removes one constraint. The
obtained DOF can be used to avoid the obstacle. The constraint is activated
again when the obstacle is avoided. The controller also ensures the global
convergence by activating a partial path-following task when a local minimum is
reached. The robot finally accomplishes the global task by sequencing
full-constraining tasks, redundant tasks plus avoidance criteria, and
path-following phases.
|
Application to a Humanoid Robot

|
This tasks sequencing formalism has been validated to control a highly redundant robot realizing complex composed tasks in real environment.
It has been realized through a collaboration with the
Joint Robotic Laboratory, Tsukuba, Japan.
The experimental platform is the humanoid robot HRP-2. This robot is a highly
redundant humanoid mobile robot. It has several sensors for closed-loop control,
including cameras. Two arms with hands enable it to realize complex task such
as object grasping. Complex executions such as door-opening have already been
realized using this robot. The current solution uses a 3D-reconstruction system
to map the robot environment, and then an open-loop motion generator to drive
the robot to its goal. Although this system provides a complete solution, it
can be greatly improved in terms of robustness to detection noises and to
environment changes by the use of a reactive closed-loop control such as task
sequencing. We have thus adapted and implemented the tasks sequencing
formalism to the Humanoid Robot HRP-2 for a grasping-while-walking task.
Videos: External view (4.9M, MPEG-1 format) - Embeded-camera view(5.5M, MPEG-1 format)
|
|
Grasping a ball while walking
References
- N. Mansard, O. Stasse, F. Chaumette, K. Yokoi. Visually-guided grasping while walking on a humanoid robot., IEEE Int. Conf. on Robotics and Automation, ICRA'07, Roma, Italy, April 2007.